-
1 процесс функциональный
процесс функциональныйпрацэс функцыянальныРусско-белорусский словарь математических, физических и технических терминов > процесс функциональный
-
2 процесс
процесспрацэс, -су- процесс автоволновой
- процесс адгезионного контактирования
- процесс активации
- процесс большой длительности
- процесс быстропротекающий
- процесс вакуумный
- процесс взаимодействия
- процесс винеровский
- процесс воспроизводства ядерного топлива
- процесс высокоэнергетический
- процесс вычислительный
- процесс газификации
- процесс горения
- процесс деструкции плёнок
- процесс детерминированный
- процесс дискретный
- процесс диспергирования
- процесс диссипативный
- процесс зарядовый
- процесс захвата
- процесс зернообразования плёнок
- процесс изготовления
- процесс испытаний
- процесс квадратурный
- процесс квазипериодический
- процесс коагуляции аэрозольных частиц
- процесс конечно-шаговый
- процесс лабораторный
- процесс лазерной литографии
- процесс марковский
- процесс материалосберегающий
- процесс межзонный
- процесс метаболически зависимый
- процесс многостадийный
- процесс моделирования
- процесс модификации поверхности
- процесс монолитизации
- процесс нагрева
- процесс нагружения
- процесс накопления повреждений
- процесс нанесения резиста
- процесс наработки делящихся нуклидов
- процесс нелинейного взаимодействия
- процесс нелинейный
- процесс непрерывного литья
- процесс неравновесный
- процесс нестационарный
- процесс нуклеации
- процесс нуклон-нуклонного рассеяния
- процесс окисления
- процесс опытный технологический
- процесс осаждения веществ из газовой фазы
- процесс очистки газовых выбросов
- процесс переноса
- процесс переходный
- процесс плазменный
- процесс плазмодинамический
- процесс плазмофотостимулированный
- процесс подготовки
- процесс ползучести
- процесс получения покрытий
- процесс получения энергии
- процесс превращения
- процесс принятия решения
- процесс производственный
- процесс происходящий
- процесс промышленный
- процесс развития аварийной ситуации
- процесс разработанный
- процесс разрушения покрытия
- процесс рассеяния нуклонов на ядрах
- процесс рекомбинации ионов
- процесс релаксации
- процесс рождения мезонов
- процесс рождения фермион-антифермионых пар
- процесс с заданной спектральной характеристикой
- процесс сварки
- процесс седиментации аэрозольных частиц
- процесс синтеза
- процесс случайный
- процесс создания
- процесс стабильный во времени
- процесс струйный
- процесс твердофазный
- процесс телеграфный
- процесс телеобработки данных
- процесс тепловой
- процесс теплообмена
- процесс теплопередачи
- процесс термогидравлический
- процесс технологический
- процесс технологический малолюдный
- процесс технологический проектируемый
- процесс удара
- процесс уплотнения пористых тел
- процесс ферритизации
- процесс физико-химический
- процесс физический
- процесс формирования масок
- процесс фоторасщепления дейтрона
- процесс фотохимический
- процесс функциональный
- процесс функционирования системы
- процесс шагового резания
- процесс экологически безвредный
- процесс эксплуатации
- процесс электрорелаксационный
- процесс электроспекания композиций
- процесс энергетический
- процесс энерговклада
- процесс эргатическийРусско-белорусский словарь математических, физических и технических терминов > процесс
-
3 функциональный подход к анализу системы
функциональный подход к анализу системы
В отличие от генетического — изучение реального действия, функционирования системы. Основными понятиями такого анализа считаются два: процесс функционирования и закон функционирования. Процесс, или режим, функционирования показывает изменение состояний системы. Закон функционирования — это правила, по которым производятся такие изменения. Зная начальное состояние и закон функционирования системы, можно предвидеть ее будущее поведение.
[ http://slovar-lopatnikov.ru/]Тематики
EN
Русско-английский словарь нормативно-технической терминологии > функциональный подход к анализу системы
-
4 functional approach
функциональный подход к анализу системы
В отличие от генетического — изучение реального действия, функционирования системы. Основными понятиями такого анализа считаются два: процесс функционирования и закон функционирования. Процесс, или режим, функционирования показывает изменение состояний системы. Закон функционирования — это правила, по которым производятся такие изменения. Зная начальное состояние и закон функционирования системы, можно предвидеть ее будущее поведение.
[ http://slovar-lopatnikov.ru/]Тематики
EN
3.162 функциональный подход (functional approach): Подход к модели предприятия, позволяющий осуществить представление и модификацию процессов предприятия, их функциональных характеристик, поведения, входных и выходных параметров.
Источник: ГОСТ Р 54136-2010: Системы промышленной автоматизации и интеграция. Руководство по применению стандартов, структура и словарь оригинал документа
Англо-русский словарь нормативно-технической терминологии > functional approach
-
5 failure
- сбой (в информационных технологиях)
- сбой (в информационных технологиях)
- разрушение
- повреждение
- отказ (функционального блока)
- отказ (объекта)
- отказ (в работе)
- отказ
- неудачная скважина (по статистической терминологии)
- неудачная попытка
- неудача (разработки или эксперимента)
- неудача
- несрабатывание
- несостоятельность (уравнения)
- неисправность
- недостаток или отсутствие
- авария
авария
Неожиданный выход из строя конструкции, машины, системы инженерного оборудования сооружений
[Терминологический словарь по строительству на 12 языках (ВНИИИС Госстроя СССР)]
авария
Опасное техногенное происшествие, создающее на объекте, определенной территории или акватории угрозу жизни и здоровью людей и приводящее к разрушению зданий, сооружений, оборудования и транспортных средств, нарушению производственного или транспортного процесса, а также к нанесению ущерба окружающей природной среде.
Примечание
Крупная авария, как правило с человеческими жертвами, является катастрофой.
[ ГОСТ Р 22.0.05-94]
авария
Опасное техногенное происшествие, создающее на объекте, определенной территории или акватории угрозу жизни и здоровью людей и приводящее к разрушению зданий, сооружений, оборудования и транспортных средств, нарушению производственного или транспортного процесса, а также к нанесению ущерба окружающей природной среде.
[СО 34.21.307-2005]
авария
Разрушение сооружений и (или) технических устройств, применяемых на опасном производственном объекте, неконтролируемые взрыв и (или) выброс опасных веществ
[Федеральный закон от 21. 07.1 997 № 116-ФЗ «О промышленной безопасности опасных производственных объектов»]
[СТО Газпром РД 2.5-141-2005]
авария
Разрушение сооружений и (или) технических устройств, применяемых на опасном производственном объекте, неконтролируемый взрыв и (или) выброс опасных веществ.
[ ГОСТ Р 12.3.047-98]
авария
Разрушение сооружений, оборудования, технических устройств, неконтролируемые взрыв и/или выброс опасных веществ, создающие угрозу жизни и здоровью людей.
[ ГОСТ Р 12.0.006-2002]
авария
Событие, заключающееся в переходе объекта с одного уровня работоспособности или относительного уровня функционирования на другой, существенно более низкий, с крупным нарушением режима работы объекта.
Примечание.
Авария может привести к частичному или полному нарушению объекта, массовому нарушению питания потребителей, созданию опасных условий для человека и окружающей среды. Признаки аварии указываются в нормативно-технической документации.
[ОАО РАО "ЕЭС России" СТО 17330282.27.010.001-2008]
авария
аварийная ситуация
crash
Неустранимая неисправность, приводящая к перерыву в работе и потери части информации. Восстановление работоспособности аппаратных средств обычно осуществляется путем неоперативной замены неисправных модулей на исправные.
[Л.М. Невдяев. Телекоммуникационные технологии. Англо-русский толковый словарь-справочник. Под редакцией Ю.М. Горностаева. Москва, 2002]Тематики
- безопасность гидротехнических сооружений
- газораспределение
- пожарная безопасность
- техногенные чрезвычайные ситуации
EN
DE
FR
недостаток или отсутствие
—
[А.С.Гольдберг. Англо-русский энергетический словарь. 2006 г.]Тематики
EN
неисправность
отказ в работе
Состояние машины, характеризующееся неспособностью выполнять заданную функцию, исключая случаи проведения профилактического технического обслуживания, других запланированных действий или недостаток внешних ресурсов (например, отключение энергоснабжения).
Примечание 1
Неисправность часто является результатом повреждения самой машины, однако она может иметь место и без повреждения.
Примечание 2
На практике термины «неисправность», «отказ» и «повреждение» часто используются как синонимы.
[ ГОСТ Р ИСО 12100-1:2007]
неисправность
Состояние оборудования, характеризуемое его неспособностью выполнять требуемую функцию, исключая профилактическое обслуживание или другие планово-предупредительные действия, а также исключая неспособность выполнять требуемую функцию из-за недостатка внешних ресурсов.
Примечание - Неисправность часто является следствием отказа самого оборудования, но может существовать и без предварительного отказа.
[ГОСТ ЕН 1070-2003]
неисправность
Состояние технического объекта (элемента), характеризуемое его неспособностью выполнять требуемую функцию, исключая периоды профилактического технического обслуживания или другие планово-предупредительные действия, или в результате недостатка внешних ресурсов.
Примечания
1 Неисправность является часто следствием отказа самого технического объекта, но может существовать и без предварительного отказа.
2 Английский термин «fault» и его определение идентичны данному в МЭК 60050-191 (МЭС 191-05-01) [1]. В машиностроении чаще применяют французский термин «defaut» или немецкий термин «Fehler», чем термины «panne» и «Fehlzusstand», которые употребляют с этим определением.
[ ГОСТ Р ИСО 13849-1-2003]Тематики
EN
- abnormality
- abort
- abortion
- breakage
- breakdown
- bug
- defect
- disease
- disrepair
- disturbance
- fail
- failure
- failure occurrence
- fault
- faultiness
- fouling
- health problem
- layup
- malfunction
- problem
- shutdown
- trouble
DE
FR
несостоятельность (уравнения)
—
[А.С.Гольдберг. Англо-русский энергетический словарь. 2006 г.]Тематики
EN
неудача
провал
—
[Англо-русский глоссарий основных терминов по вакцинологии и иммунизации. Всемирная организация здравоохранения, 2009 г.]Тематики
- вакцинология, иммунизация
Синонимы
EN
неудача (разработки или эксперимента)
—
[А.С.Гольдберг. Англо-русский энергетический словарь. 2006 г.]Тематики
EN
неудачная скважина (по статистической терминологии)
—
[ http://slovarionline.ru/anglo_russkiy_slovar_neftegazovoy_promyishlennosti/]Тематики
EN
отказ
Нарушение способности оборудования выполнять требуемую функцию.
Примечания
1. После отказа оборудование находится в неисправном состоянии.
2. «Отказ» является событием, в отличие от «неисправности», которая является состоянием.
3. Это понятие, как оно определено, не применяют коборудованиюобъекту, состоящему только из программных средств.
4. На практике термины «отказ» и «неисправность» часто используют как синонимы.
[ГОСТ ЕН 1070-2003]
[ ГОСТ Р ИСО 13849-1-2003]
[ ГОСТ Р МЭК 60204-1-2007]
отказ
Событие, заключающееся в нарушении работоспособного состояния объекта.
[ ГОСТ 27.002-89]
[ОСТ 45.153-99]
[СТО Газпром РД 2.5-141-2005]
[СО 34.21.307-2005]
отказ
Событие, заключающееся в нарушении работоспособного состояния машины и (или) оборудования вследствие конструктивных нарушений при проектировании, несоблюдения установленного процесса производства или ремонта, невыполнения правил или инструкций по эксплуатации.
[Технический регламент о безопасности машин и оборудования]EN
failure
the termination of the ability of an item to perform a required function
NOTE 1 – After failure the item has a fault.
NOTE 2 – "Failure" is an event, as distinguished from "fault", which is a state.
NOTE 3 – This concept as defined does not apply to items consisting of software only.
[IEV number 191-04-01]
NOTE 4 - In practice, the terms fault and failure are often used synonymously
[IEC 60204-1-2006]FR
défaillance
cessation de l'aptitude d'une entité à accomplir une fonction requise
NOTE 1 – Après défaillance d'une entité, cette entité est en état de panne.
NOTE 2 – Une défaillance est un passage d'un état à un autre, par opposition à une panne, qui est un état.
NOTE 3 – La notion de défaillance, telle qu'elle est définie, ne s'applique pas à une entité constituée seulement de logiciel.
[IEV number 191-04-01]Тематики
- безопасность в целом
- безопасность гидротехнических сооружений
- безопасность машин и труда в целом
- газораспределение
- надежность средств электросвязи
- надежность, основные понятия
Обобщающие термины
EN
DE
FR
отказ (в работе)
выход из строя
повреждение
поломка
неисправность
несрабатывание
сбой
—
[ http://slovarionline.ru/anglo_russkiy_slovar_neftegazovoy_promyishlennosti/]Тематики
Синонимы
EN
отказ (объекта)
Событие, заключающееся в нарушении работоспособного состояния объекта (ГОСТ 27. 002).
[ОСТ 45.152-99 ]Тематики
- тех. обсл. и ремонт средств электросвязи
EN
отказ
Прекращение способности функционального блока выполнять необходимую функцию.
Примечания
1. Определение в МЭС 191-04-01 является идентичным, с дополнительными комментариями [ИСО/МЭК 2382-14-01-11].
2. Соотношение между сбоями и отказами в МЭК 61508 и МЭС 60050(191) см. на рисунке.
3. Характеристики требуемых функций неизбежно исключают определенные режимы работы, некоторые функции могут быть определены путем описания режимов, которых следует избегать. Возникновение таких режимов представляет собой отказ.
4. Отказы являются либо случайными (в аппаратуре), либо систематическими (в аппаратуре или в программном обеспечении).
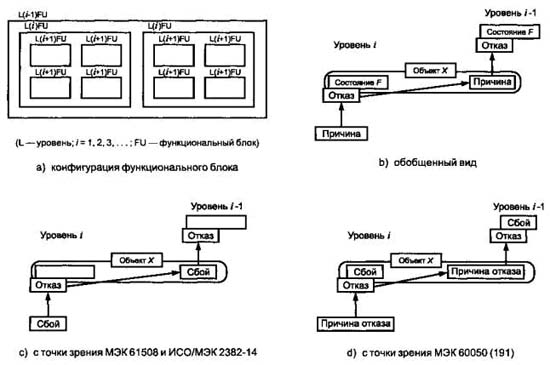
Рис. Модель отказа
Примечания
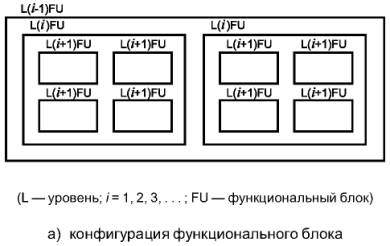
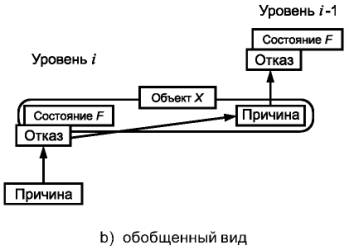
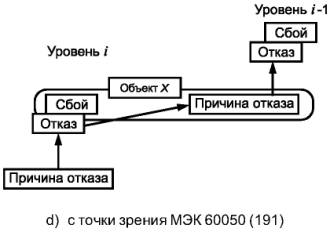
1. Как показано на рисунке а), функциональный блок может быть представлен в виде многоуровневой иерархической конструкции, каждый из уровней которой может быть, в свою очередь, назван функциональным блоком. На уровне i «причина» может проявить себя как ошибка (отклонение от правильного значения или состояния) в пределах функционального блока, соответствующего данному уровню i. Если она не будет исправлена или нейтрализована, эта ошибка может привести к отказу данного функционального блока, который в результате перейдет в состояние F, в котором он более не может выполнять необходимую функцию (см. рисунок b)). Данное состояние F уровня i может в свою очередь проявиться в виде ошибки на уровне функционального блока i - 1, которая, если она не будет исправлена или нейтрализована, может привести к отказу функционального блока уровня i - 1.
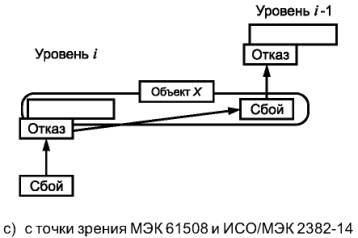
2. В этой причинно - следственной цепочке один и тот же элемент («объект X ») может рассматриваться как состояние F функционального блока уровня i, в которое он попадает в результате отказа, а также как причина отказа функционального блока уровня i - 1. Данный «объект X » объединяет концепцию «отказа» в МЭК 61508 и ИСО/МЭК 2382-14, в которой внимание акцентируется на причинном аспекте, как показано на рисунке c), и концепцию «отказа» из МЭС 60050(191), в которой основное внимание уделено аспекту состояния, как показано на рисунке d). В МЭС 60050(191) состояние F называется отказом, а в МЭК 61508 и ИСО/МЭК 2382-14 оно не определено.
3. В некоторых случаях отказ или ошибка могут быть вызваны внешним событием, таким как молния или электростатические помехи, а не внутренним отказом. Более того, ошибка (в обоих словарях) может возникать без предшествующего отказа. Примером такой ошибки может быть ошибка проектирования.
[ ГОСТ Р МЭК 61508-4-2007]Тематики
EN
повреждение
Неспособность машины выполнять заданную функцию.
Примечание 1
Неисправность, отказ в работе машины является результатом ее повреждения.
Примечание 2
Повреждение является событием в отличие от неисправности и отказа, которые являются состоянием.
Примечание 3
Рассматриваемое понятие не распространяется на программное обеспечение (см. МЭС 191-04-01
[ ГОСТ Р ИСО 12100-1:2007]
повреждение
Событие, заключающееся в нарушении исправного состояния объекта при сохранении работоспособного состояния.
[ ГОСТ 27.002-89]
[ОСТ 45.153-99]
[СТО Газпром РД 2.5-141-2005]
повреждение
По ГОСТ 13377-75
[ ГОСТ 24166-80]EN
damage
any change in visual appearance or alteration of mechanical integrity
[IEC 60571, ed. 2.0 (1998-02)]
damage
degradation of a component leading to penetration by acid or moisture
[IEC 62662, ed. 1.0 (2010-08)]FR
détérioration
tout changement dans l’aspect ou toute altération de l’intégrité mécanique
[IEC 60571, ed. 2.0 (1998-02)]Тематики
- безопасность машин и труда в целом
- газораспределение
- надежность средств электросвязи
- надежность, основные понятия
- ремонт судов
Обобщающие термины
EN
DE
FR
разрушение
Кинетический процесс зарождения и (или) развития трещин в результате действия внешних или внутренних напряжений, завершающегося разделением изделия (образца) на части. Разрушение классифицируют по разным признакам на следующие виды: по характеру силового воздействия на статически кратковременное, статически длительное, усталостное и ударное (динамическое); по ориентировке макроскопической поверхности разрушения — на разрушение путем отрыва (поверхность разрушения перпендикулярна направлению наибольших растягивающих напряжений или среза (поверхность разрушения составляет угол около 45°); по величине пластической деформации, предшествующей разрушению — на хрупкое и вязкое; по расположению поверхности разрушения относительно структуры — на транскристаллическое (внутрикристалл.), интеркристаллическое (межкристалл.) и смешанное; по влиянию внешней среды — на водородное, жидкометаллическое, коррозионное и т.п. В механике разрушения различают три способа взаимного смещения поверхностей трещины: I — отрыв; II — поперечный и III — продольный (чистый) сдвиг. Если трещина распространяется так же легко (без заметных следов пластической деформации), как и ее зарождение, то разрушение называют хрупким. Когда распространение трещины значительно более энергоемкий (на несколько порядков), чем ее зарождение, процесс, сопровождаемый значительной пластической деформацией не только вблизи поверхности разрушения, но и в объеме тела, то разрушение вязкое. Энергетические затраты на распространение трещины определяет ее трещиностойкость. Характер разрушения проявляется в структуре поверхности излома, изучаемого фрактографией.
разрушение
Неровная поверхность, возникающая при разрушении фрагмента металла.
[ http://www.manual-steel.ru/eng-a.html]Тематики
EN
сбой (в информационных технологиях)
Потеря способности функционировать в соответствии со спецификацией или предоставлять требуемый результат. Термин «сбой» может быть использован по отношению к ИТ-услугам, процессам, видам деятельности, конфигурационным единицам и т. п. Сбой часто служит причиной инцидента.
[ http://www.dtln.ru/slovar-terminov]Тематики
EN
сбой (в информационных технологиях)
(ITIL Service Operation)
Потеря способности функционировать в соответствии со спецификацией или предоставлять требуемый результат. Этот термин может быть использован по отношению к ИТ-услугам, процессам, деятельности, конфигурационным единицам и т.п. Сбой часто служит причиной инцидента.
[Словарь терминов ITIL версия 1.0, 29 июля 2011 г.]EN
failure
(ITIL Service Operation)
Loss of ability to operate to specification, or to deliver the required output. The term may be used when referring to IT services, processes, activities, configuration items etc. A failure often causes an incident.
[Словарь терминов ITIL версия 1.0, 29 июля 2011 г.]Тематики
EN
отказ (failure): Событие, заключающееся в нарушении работоспособного состояния объекта
[ ГОСТ 27.002-89, статья 3.3].
Источник: ГОСТ Р 52527-2006: Установки газотурбинные. Надежность, готовность, эксплуатационная технологичность и безопасность оригинал документа
3.5 отказ (failure): Прекращение способности элемента исполнять требуемую функцию.
Примечания
1 После отказа элемент становится неисправным.
2 Отказ является событием в отличие от неисправности, которая является состоянием.
Источник: ГОСТ Р 51901.5-2005: Менеджмент риска. Руководство по применению методов анализа надежности оригинал документа
3.3. Отказ
Failure
Событие, заключающееся в нарушении работоспособного состояния объекта
Источник: ГОСТ 27.002-89: Надежность в технике. Основные понятия. Термины и определения оригинал документа
3.32 повреждение (failure): Неспособность машины выполнять заданную функцию.
Примечание 1 - Неисправность, отказ в работе машины является результатом ее повреждения.
Примечание 2 - Повреждение является событием в отличие от неисправности и отказа, которые являются состоянием.
Примечание 3 - Рассматриваемое понятие не распространяется на программное обеспечение (см. МЭС 191-04-01 [11]).
Источник: ГОСТ Р ИСО 12100-1-2007: Безопасность машин. Основные понятия, общие принципы конструирования. Часть 1. Основные термины, методология оригинал документа
3.4 отказ (failure): Утрата изделием способности выполнять требуемую функцию.
Примечание - Отказ является событием в отличие от неисправности, которая является состоянием.
Источник: ГОСТ Р ИСО 13379-2009: Контроль состояния и диагностика машин. Руководство по интерпретации данных и методам диагностирования оригинал документа
3.2 отказ (failure): Утрата объектом способности выполнять требуемую функцию1).
___________
1) Более детально см. [1].
Источник: ГОСТ Р 51901.12-2007: Менеджмент риска. Метод анализа видов и последствий отказов оригинал документа
3.29 отказ (failure): Событие, происходящее с элементом или системой и вызывающее один или оба следующих эффекта: потеря элементом или системой своих функций или ухудшение работоспособности до степени существенного снижения безопасности установки, персонала или окружающей среды.
Источник: ГОСТ Р 54382-2011: Нефтяная и газовая промышленность. Подводные трубопроводные системы. Общие технические требования оригинал документа
3.1.3 отказ (failure): Потеря объектом способности выполнять требуемую функцию.
Примечания
1. После отказа объект имеет неисправность.
2. Отказ - это событие в отличие от неисправности, которое является состоянием.
3. Данное понятие по определению не касается программного обеспечения в чистом виде.
[МЭК 60050-191 ][1]
Источник: ГОСТ Р 50030.5.4-2011: Аппаратура распределения и управления низковольтная. Часть 5.4. Аппараты и элементы коммутации для цепей управления. Метод оценки рабочих характеристик слаботочных контактов. Специальные испытания оригинал документа
3.5 отказ (failure): Неспособность конструкции, системы или компонента функционировать в пределах критериев приемлемости.
[Глоссарий МАГАТЭ по безопасности, издание 2.0, 2006]
Примечание 1 - Отказ - это результат неисправности аппаратных средств, дефекта программного обеспечения, неисправности системы или ошибки оператора, связанной с ними сигнальной траекторией, которая и вызывает отказ.
Примечание 2 - См. также «дефект», «отказ программного обеспечения».
Источник: ГОСТ Р МЭК 62340-2011: Атомные станции. Системы контроля и управления, важные для безопасности. Требования по предотвращению отказов по общей причине оригинал документа
3.3 отказ (failure): Утрата изделием способности выполнять требуемую функцию.
Примечание - Обычно отказ является следствием неисправности одного или нескольких узлов машины.
Источник: ГОСТ Р ИСО 17359-2009: Контроль состояния и диагностика машин. Общее руководство по организации контроля состояния и диагностирования оригинал документа
3.16 отказ (failure): Отклонение реального функционирования от запланированного. [МЭК 61513, пункт 3.21, изменено]
Источник: ГОСТ Р МЭК 60880-2010: Атомные электростанции. Системы контроля и управления, важные для безопасности. Программное обеспечение компьютерных систем, выполняющих функции категории А оригинал документа
3.6.4 отказ (failure): Прекращение способности функционального блока выполнять необходимую функцию.
Примечания
1. Определение в МЭС 191-04-01 является идентичным, с дополнительными комментариями [ИСО/МЭК 2382-14-01-11].
2. Соотношение между сбоями и отказами в МЭК 61508 и МЭС 60050(191) см. на рисунке 4.
3. Характеристики требуемых функций неизбежно исключают определенные режимы работы, некоторые функции могут быть определены путем описания режимов, которых следует избегать. Возникновение таких режимов представляет собой отказ.
4. Отказы являются либо случайными (в аппаратуре), либо систематическими (в аппаратуре или в программном обеспечении), см. 3.6.5 и 3.6.6.
Примечания
1. Как показано на рисунке 4а), функциональный блок может быть представлен в виде многоуровневой иерархической конструкции, каждый из уровней которой может быть, в свою очередь, назван функциональным блоком. На уровне i «причина» может проявить себя как ошибка (отклонение от правильного значения или состояния) в пределах функционального блока, соответствующего данному уровню i. Если она не будет исправлена или нейтрализована, эта ошибка может привести к отказу данного функционального блока, который в результате перейдет в состояние F, в котором он более не может выполнять необходимую функцию (см. рисунок 4b)). Данное состояние F уровня i может в свою очередь проявиться в виде ошибки на уровне функционального блока i - 1, которая, если она не будет исправлена или нейтрализована, может привести к отказу функционального блока уровня i - 1.
2. В этой причинно-следственной цепочке один и тот же элемент («объект X») может рассматриваться как состояние F функционального блока уровня i, в которое он попадает в результате отказа, а также как причина отказа функционального блока уровня i - 1. Данный «объект X» объединяет концепцию «отказа» в МЭК 61508 и ИСО/МЭК 2382-14, в которой внимание акцентируется на причинном аспекте, как показано на рисунке 4с), и концепцию «отказа» из МЭС 60050(191), в которой основное внимание уделено аспекту состояния, как показано на рисунке 4d). В МЭС 60050(191) состояние F называется отказом, а в МЭК 61508 и ИСО/МЭК 2382-14 оно не определено.
3. В некоторых случаях отказ или ошибка могут быть вызваны внешним событием, таким как молния или электростатические помехи, а не внутренним отказом. Более того, ошибка (в обоих словарях) может возникать без предшествующего отказа. Примером такой ошибки может быть ошибка проектирования.
Рисунок 4 - Модель отказа
Источник: ГОСТ Р МЭК 61508-4-2007: Функциональная безопасность систем электрических, электронных, программируемых электронных, связанных с безопасностью. Часть 4. Термины и определения оригинал документа
3.21 отказ (failure): Отклонение реального функционирования от запланированного (см. рисунок 3). [МЭК 60880-2, пункт 3.8]
Примечание 1 - Отказ является результатом сбоя в аппаратуре, программном обеспечении, системе или ошибки оператора или обслуживания и отражается на прохождении сигнала.
Примечание 2 - См. также «дефект», «отказ программного обеспечения».
Источник: ГОСТ Р МЭК 61513-2011: Атомные станции. Системы контроля и управления, важные для безопасности. Общие требования оригинал документа
3.22 отказ (failure): Событие, заключающееся в нарушении работоспособного состояния элементов или систем платформы.
Источник: ГОСТ Р 54483-2011: Нефтяная и газовая промышленность. Платформы морские для нефтегазодобычи. Общие требования оригинал документа
5. Повреждение
D. Beschädigung
E. Failure
F. Endommagement
Источник: ГОСТ 24166-80: Система технического обслуживания и ремонта судов. Ремонт судов. Термины и определения оригинал документа
3.1.29 отказ (failure): Окончание способности изделия выполнять требуемую функцию.
Источник: ГОСТ Р 54828-2011: Комплектные распределительные устройства в металлической оболочке с элегазовой изоляцией (КРУЭ) на номинальные напряжения 110 кВ и выше. Общие технические условия оригинал документа
Англо-русский словарь нормативно-технической терминологии > failure
-
6 feature
- элемент
- характерная черта
- характеристика
- функция
- признак объекта
- признак
- объект
- мн. защитные меры в системе безопасности
- геологический объект
- возможность
геологический объект
характер (местности)
подробность (рельефа)
аномалия
—
[ http://slovarionline.ru/anglo_russkiy_slovar_neftegazovoy_promyishlennosti/]Тематики
Синонимы
EN
мн. защитные меры в системе безопасности
(для предотвращения аварийных ситуаций на АЭС)
[А.С.Гольдберг. Англо-русский энергетический словарь. 2006 г.]Тематики
EN
объект
То что может быть индивидуально описано и рассмотрено.
Примечание
Объектом может быть, например:
- деятельность или процесс
- продукция
- организация, система или отдельное лицо, или
- любая комбинация из них.
[ИСО 8402-94 ]
объект
Любая часть, элемент, устройство, подсистема, функциональная единица, аппаратура или система, которые можно рассматривать в отдельности [12].
Примечания
1. Объект может состоять из технических средств, программных средств или их сочетания и может также в частных случаях включать технический персонал.
2. Ряд объектов, например, их совокупность или выборка, может рассматриваться как объект.
[12] Международный стандарт СЕI IЕС 50 (191).
Глава 191. Надежность и качество услуг.
[ОСТ 45.127-99]
объект
Деятельность или процесс, продукция, организация, система, отдельное лицо или любая комбинация из них, индивидуально описанная и рассмотренная.
[ ГОСТ Р 52104-2003]
объект
Составная часть схемы, отражающая неделимый элемент описываемой предметной области.
[Департамент лингвистических услуг Оргкомитета «Сочи 2014». Глоссарий терминов]
объект
1. Предмет, вещь, явление, на которые направлена деятельность, то, что подвергается какому-либо воздействию. 2. В обиходной речи — вообще всякий предмет, вещь. 3. В философии — то, что существует вне нас и независимо от нас, внешний мир, действительность. В словаре принято первое из перечисленных значений (см., например, Объект управления, Хозяйственные объекты, Экономический объект).
[ http://slovar-lopatnikov.ru/]EN
object
Scheme component reflecting a primary unit of object domain.
[Департамент лингвистических услуг Оргкомитета «Сочи 2014». Глоссарий терминов]Тематики
- защита информации
- ресурсосбережение, обращение с отходами
- спорт (управление Играми)
- управл. качеством и обеспеч. качества
- экономика
EN
признак
Свойство объекта, обуславливающее его различие или общность с другими объектами.
[ГОСТ 7.0-99]
Физическая, морфологическая характеристика или характеристика роста лесоматериалов, оказывающая влияние на их применение.
http://www.wood.ru/ru/slterm.html
признак
1. Величина, характеризуемая в процессе статистического исследования. П. может быть качественным (мнение, суждение) или количественным (например, количество покупок в магазине за день), одномерным (толщина бумаги при ее измерении контролером ОТК) или многомерным (например, выработка рабочих и их уровень образования), что зависит от числа наблюдаемых свойств. П. называется ранговым, если он порождает упорядоченное разбиение совокупности на классы (например, сорта продукции) от низшего к высшему. П. может быть непрерывным или дискретным. Важно, что П. — неоднозначная, способная изменяться величина. Булевым (дихотомическим) или бивариантным называется П., имеющий два значения: обычно или он есть, или его нет. 2. В социально-экономических задачах П. объектов используются как критерии классификации, формирования шкал. Классификационный П. обычно отражает существенные для данного исследования или проектирования системы свойства элемента. В ряде случаев оказывается целесообразным подвергать качественные П. условной квантификации, чтобы превратить их в количественные (см. Шкалы). 3. П. в информационно-поисковой системе — набор фактов, характеризующих объект и представленных в формализованном виде. На их основе строятся классификаторы фактографических информационно-поисковых систем, они могут укрупняться и, наоборот, дробиться на более мелкие в зависимости от потребностей потребителей (пользователей) системы.
[ http://slovar-lopatnikov.ru/]Тематики
EN
признак объекта
Величина, характеризующая свойство объекта, значения которой определяются по качественной шкале.
[Сборник рекомендуемых терминов. Выпуск 107. Теория управления.
Академия наук СССР. Комитет научно-технической терминологии. 1984 г.]Тематики
- автоматизация, основные понятия
EN
функция
Команда или группа людей, а также инструментарий или другие ресурсы, которые они используют для выполнения одного или нескольких процессов или деятельности. Например, служба поддержки пользователей. Этот термин также имеет другое значение: предназначение конфигурационной единицы, человека, команды, процесса или ИТ-услуги. Например, одна из функций услуги электронной почты может заключаться в сохранении и пересылке исходящей почты, тогда как функция бизнес-процесса может заключаться в отправке товаров заказчикам.
[Словарь терминов ITIL версия 1.0, 29 июля 2011 г.]
функция
Синоним термина функциональное направление деятельности.
[Департамент лингвистических услуг Оргкомитета «Сочи 2014». Глоссарий терминов]
функция
1. Зависимая переменная величина; 2. Соответствие y=f(x) между переменными величинами, в силу которого каждому рассматриваемому значению некоторой величины x (аргумента или независимой переменной) соответствует определенное значение другой величины y (зависимой переменной или Ф. в значении 1.). Ф. задана, если известен закон, определяющий такое соответствие. На практике она задается формулой, таблицей или графиком (есть и другие способы, например, алгоритмический — см. Алгоритм). При построении графика функции анализируются такие ее свойства, как четность или нечетность, нулевые значения, периодичность (см. Периодическая функция), монотонность (см. Монотонная функция), наличие асимптоты и другие. Важны еще два часто употребляемых понятия: функция, заданная в виде уравнения f(x,y) =0, неразрешенного относительно y, называется неявной; функция, заданная в виде y= f(g(x), то есть функция функции, называется сложной Ф. или, иначе, суперпозицией функций g и f. (См. также Функционал). Сложную функцию часто записывают в виде y=f(u), где u=g(x), при этом u называют промежуточным аргументом. Множество значений аргументов функции X (x ? X) называется областью определения функции, а, соответственно, множество Y — областью значений функции или областью изменения функции. См. также Отображение. В различных экономических приложениях применяются (и рассматриваются в словаре), следующие функции: Взвешивающие, Дифференцируемые, Гладкие, Кусочно-линейные, Кусочно-непрерывные, Линейные, Нелинейные, Непрерывные, Сепарабельные, Экспоненты и др. См. также: Вектор-функция, Гессиан, Мультипликативная форма представления функции, Производная, Рекурсия, Частная производная, Эластичность функции, Якобиан, Интеграл.
[ http://slovar-lopatnikov.ru/]EN
function
A team or group of people and the tools or other resources they use to carry out one or more processes or activities – for example, the service desk. The term also has two other meanings: • An intended purpose of a configuration item, person, team, process or IT service. For example, one function of an email service may be to store and forward outgoing mails, while the function of a business process may be to despatch goods to customers.
[Словарь терминов ITIL версия 1.0, 29 июля 2011 г.]
function
Another term for functional area.
[Департамент лингвистических услуг Оргкомитета «Сочи 2014». Глоссарий терминов]Тематики
EN
характеристика
Отличительное свойство.
Примечания
1. Характеристика может быть присущей или присвоенной.
2. Характеристика может быть качественной или количественной.
3. Существуют различные классы характеристик, такие как:
- физические (например, механические, электрические, химические или биологические характеристики);
- органолептические (например, связанные с запахом, осязанием, вкусом, зрением, слухом);
- этические (например, вежливость, честность, правдивость);
- временные(например, пунктуальность, безотказность, доступность);
- эргономические(например, физиологические характеристики или связанные с безопасностью человека);
- функциональные(например, максимальная скорость самолета).
[ ГОСТ Р ИСО 9000-2008]
характеристика
-
[IEV number 151-15-34]EN
characteristic
relationship between two or more variable quantities describing the performance of a device under given conditions
[IEV number 151-15-34]FR
(fonction) caractéristique, f
relation entre deux ou plusieurs variables décrivant le fonctionnement d'un dispositif dans des conditions spécifiées
[IEV number 151-15-34]Тематики
- системы менеджмента качества
- электротехника, основные понятия
EN
- ability
- attribute
- behavior
- behaviour
- categorization
- character
- characteristic
- characteristic curve
- curve
- description
- feature
- letter of reference
- parameter
- pattern
- performance
- property
- qualification
- quality
- rating
- record
- response
- signature
- state
- testimonial
DE
FR
- (fonction) caractéristique, f
характерная черта
особенность
свойство
признак
средство
характеристика
возможность
отличительный признак
функция
функциональный
—
[Л.Г.Суменко. Англо-русский словарь по информационным технологиям. М.: ГП ЦНИИС, 2003.]Тематики
Синонимы
- особенность
- свойство
- признак
- средство
- характеристика
- возможность
- отличительный признак
- функция
- функциональный
EN
элемент
Обобщенный термин, под которым в зависимости от соответствующих условий может пониматься поверхность, линия, точка.
Примечания
1. Элемент может быть поверхностью (частью поверхности, плоскостью симметрии нескольких поверхностей), линией (профилем поверхности, линией пересечения двух поверхностей, осью поверхности или сечения), точкой (точкой пересечения поверхностей или линий, центром окружности или сферы).
2. В соответствии с терминологией, принятой в настоящем стандарте для поверхностей, профилей и линий, могут применяться обобщенные термины: номинальный элемент, реальный элемент, базовый элемент, прилегающий элемент, средний элемент и т.п.
[ ГОСТ 24642-81]
элемент
Первичная (для данного исследования, модели) составная часть сложного целого. См. Элемент множества, Элемент системы.
[ http://slovar-lopatnikov.ru/]Тематики
EN
DE
FR
Англо-русский словарь нормативно-технической терминологии > feature
-
7 information
- Термины, определенные в ИСО 10303-1
- СТРУКТУРА И ФОРМАТ ДАННЫХ
- информация (в кибернетике)
- информация
- Информационный бит
информация
Значимые данные.
[ ГОСТ Р ИСО 9000-2008]
информация
Любой вид знаний о предметах, фактах, понятиях и т. д. проблемной области, которыми обмениваются пользователи информационной системы
[ ГОСТ 34.320-96]
информация
Сведения (сообщения, данные) независимо от формы их представления.
Примечание
В соответствии с определением, приведенным в ГОСТ Р ИСО 9000, информацией являются значимые данные.
[ ГОСТ Р 52653-2006]
информация
Сведения, воспринимаемые человеком и (или) специальными устройствами как отражение фактов материального или духовного мира в процессе коммуникации
[ГОСТ 7.0-99]
информация
Сведения о лицах, предметах, фактах, событиях, явлениях и процессах независимо от формы их представления.
[Руководящий документ "Основные положения развития Взаимоувязанной сети связи Российской Федерации на перспективу до 2005 года"]
[ОСТ 45.127-99]
информация
сведения
Одно из наиболее актуальных, фундаментальных и дискуссионных понятий в современной науке и практике. В связи с отсутствием общего определения, в различных предметных областях имеет различные интерпретации. Философия рассматривает две противостоящие друг другу концепции: первая квалифицирует информацию как свойство всех материальных объектов, т.е. как атрибут материи (атрибутивный подход), а вторая связывает ее лишь с функционированием самоорганизующихся систем (функциональный подход). Наиболее распространенным (но не общепринятым) является определение У.Р.Эшби, дополненное А.Д.Урсулом, которые рассматривают информацию как отраженное разнообразие в любых объектах (процессах) живой и не живой природы. На бытовом уровне информация чаще всего воспринимается интуитивно и связывается с получением сведений о чем или о ком-либо. В информатике – это совокупность фактов, явлений, событий, представляющих интерес, подлежащих регистрации и обработке (по Э.А.Якубайтису). Наиболее прагматичным определением оперирует вычислительная техника, в которой информация есть содержание, присваиваемое данным (по В.И.Першикову и В.М.Савинкову).
[http://www.rol.ru/files/dict/internet/#I].
Примеры сочетаний:
information agent - информационный агент - программа, выполняющая поиск информации в Сети без указания пользователем места ее нахождения
information appliances - информационная бытовая электроника
information security - информационная безопасность
information theory - теория информации
information warfare (infowar) - информационная война
management information - управленческая информация
status information - информация о состоянии
[ http://www.morepc.ru/dict/]Тематики
- базы данных
- защита информации
- информационно-библиотечная деятельность
- информационные технологии в образовании
- информационные технологии в целом
- системы менеджмента качества
- электросвязь, основные понятия
EN
информация (в кибернетике)
Основное понятие кибернетики, точно так же экономическая И. — основное понятие экономической кибернетики. Определений этого термина много, они сложны и противоречивы. Причина этого, очевидно, в том, что И. как явлением занимается много разных наук, и кибернетика лишь самая молодая из них. И. — предмет изучения таких наук, как наука об управлении, математическая статистика, генетика, теория средств массовой И. (печать, радио, телевидение), информатика (1), занимающаяся проблемами научно-технической И., и т.д. Наконец, последнее время большой интерес к проблемам И. проявляют философы: они склонны рассматривать И. как одно из основных универсальных свойств материи, связанное с понятием отражения. При всех трактовках понятия И., она предполагает существование двух объектов: источника И. и потребителя (получателя) И. Передача И. от одного к другому происходит с помощью сигналов, которые, вообще говоря, могут не иметь никакой физической связи с ее смыслом: эта связь определяется соглашением. Например, удар в вечевой колокол означал, что надо собираться на площадь, но тем, кто не знал об этом порядке, он не сообщал никакой И. В ситуации с вечевым колоколом человек, участвующий в соглашении о смысле сигнала, знает, что в данный момент могут быть две альтернативы: вечевое собрание состоится или не состоится. Или, выражаясь языком теории И., неопределенное событие «вече» имеет два исхода. Принятый сигнал приводит к уменьшению неопределенности: человек теперь знает, что событие «вече» имеет только один исход — оно состоится. Однако, если было заранее известно, что вече состоится в таком-то часу, колокол ничего нового не сообщил. Отсюда вытекает, что, чем менее вероятно (т.е. более неожиданно) сообщение, тем больше И. оно содержит, и наоборот, чем больше вероятность исхода до совершения события, тем меньше И. содержит сигнал. Примерно такие рассуждения привели в 40-х годах XX в. к возникновению статистической, или «классической«, теории И., которая определяет понятие И. через меру уменьшения неопределенности знания о свершении какого-либо события (такая мера была названа энтропией). У истоков этой науки стояли Н.Винер, К.Шеннон и советские ученые А.Н.Колмогоров, В.А.Котельников и др. Им удалось вывести математические закономерности измерения количества И., а отсюда и такие понятия, как пропускная способность канала И., емкость запоминающих И. устройств и т.п., что послужило мощным стимулом к развитию кибернетики как науки и электронно-вычислительной техники, как применения достижений кибернетики на практике. Что касается определения ценности, полезности И. для получателя, то здесь еще много нерешенного, неясного. Если исходить из потребностей экономического управления и, следовательно, экономической кибернетики, то И. можно определить как все те сведения, знания, сообщения, которые помогают решить ту или иную задачу управления (т.е. уменьшить неопределенность ее исходов). Тогда открываются и некоторые возможности для оценки И.: она тем полезнее, ценнее, чем скорее или с меньшими затратами приводит к решению задачи. Понятие И. близко понятию «данные«. Однако между ними есть различие: данные — это сигналы, из которых еще надо извлечь И. Обработка данных есть процесс приведения их к пригодному для этого виду. Процесс их передачи от источника к потребителю и восприятия в качестве И. может рассматриваться как прохождение трех фильтров: 1) физического, или статистического (чисто количественное ограничение по пропускной способности канала, независимо от содержания данных, т.е. с точки зрения синтактики); 2) семантического (отбор тех данных, которые могут быть поняты получателем, т.е. соответствуют тезаурусу его знаний); 3) прагматического (отбор среди понятых сведений тех, которые полезны для решения данной задачи). Это хорошо показано на схеме, взятой из книги Е.Г.Ясина об экономической информации (см. рис. И.8). Соответственно, выделяются три аспекта изучения проблем И. — синтаксический, семантический и прагматический. По содержанию И. подразделяется на общественно-политическую, социально-экономическую (в том числе экономическую И.), научно-техническую и т.д. Вообще же классификаций И. много, они строятся по различным основаниям. Как правило, из-за близости понятий точно так же строятся и классификации данных. Например, И. подразделяется на статическую (постоянную) и динамическую (переменную), и данные при этом — на постоянные и на переменные. Другое деление — первичная, производная, выходная И.: так же классифицируются данные. Третье деление — И. управляющая и осведомляющая. Четвертое — избыточная, полезная и ложная. Пятое — полная (сплошная) и выборочная. См. также Банк данных, Данные, Выборочная информация, Избыточная информация, Обработка данных, Прагматический аспект информации, Релевантная информация, Сбор данных, Семантический аспект информации Теория информации, Экономическая информация, Экономическая семиотика, Энтропия. Рис. И 8. Процесс передачи и восприятия информации Д — данные; I — физический фильтр (канал связи), 1 — статистическая информация, а — статистический шум; II — семантический фильтр (тезаурус), 2 — семантическая информация, б - семантический шум; III — прагматический фильтр, 3 — прагматическая информация; в — прагматический шум (ненужная, например,. избыточная информация). И — используемая информация.
[ http://slovar-lopatnikov.ru/]Тематики
EN
3.34 информация (information): Любые данные, представленные в электронной форме, написанные на бумаге, высказанные на совещании или находящиеся на любом другом носителе, используемые финансовым учреждением для принятия решений, перемещения денежных средств, установления ставок, предоставления ссуд, обработки операций и т.п., включая компоненты программного обеспечения системы обработки.
Источник: ГОСТ Р ИСО/ТО 13569-2007: Финансовые услуги. Рекомендации по информационной безопасности
3.1 Термины, определенные в ИСО 10303-1
В настоящем стандарте применены следующие термины:
- приложение (application);
- прикладной объект (application object);
- прикладной протокол (application protocol);
- прикладная эталонная модель; ПЭМ (application reference model; ARM);
- данные (data);
- информация (information);
- интегрированный ресурс (integrated resource);
- изделие (product);
- данные об изделии (product data).
3.7.1 информация (information): Значимые данные.
Источник: ГОСТ Р ИСО 9000-2008: Системы менеджмента качества. Основные положения и словарь оригинал документа
3.2.20 информация (information): Факты, понятия или инструкции;
Источник: ГОСТ Р ИСО 10303-1-99: Системы автоматизации производства и их интеграция. Представление данных об изделии и обмен этими данными. Часть 1. Общие представления и основополагающие принципы оригинал документа
3.34 информация (information): Любые данные, представленные в электронной форме, написанные на бумаге, высказанные на совещании или находящиеся на любом другом носителе, используемые финансовым учреждением для принятия решений, перемещения денежных средств, установления ставок, предоставления ссуд, обработки операций и т.п., включая компоненты программного обеспечения системы обработки.
Источник: ГОСТ Р ИСО ТО 13569-2007: Финансовые услуги. Рекомендации по информационной безопасности
3. СТРУКТУРА И ФОРМАТ ДАННЫХ
Information
bit
Бит, вырабатываемый источником данных и предназначенный для передачи данных пользователя
Источник: ГОСТ 24402-88: Телеобработка данных и вычислительные сети. Термины и определения оригинал документа
2.9 информация (Information): Основана на понятии «данные». Добавляет значения величин для понимания предмета в заданном контексте. Является источником знаний.
Источник: ГОСТ Р 53894-2010: Менеджмент знаний. Термины и определения оригинал документа
3.2.50 информация (information): Значимые данные.
Источник: ГОСТ Р 54147-2010: Стратегический и инновационный менеджмент. Термины и определения оригинал документа
Information
bit
Источник: ГОСТ 24402-88: Телеобработка данных и вычислительные сети. Термины и определения оригинал документа
Англо-русский словарь нормативно-технической терминологии > information
-
8 server
блок обслуживания
Та часть системы массового обслуживания, в которую поступает поток требований (заявок); может состоять из одного или нескольких «приборов», «каналов«, под которыми понимаются устройства или люди, осуществляющие акт обслуживания. В первом случае Б.о. называется одноканальным, во втором – многоканальным. Блок, где заявка обслуживается только одним «прибором», после чего покидает систему, называется однофазным; Б., в котором каждая заявка последовательно проходит несколько «приборов» – многофазным.
[ http://slovar-lopatnikov.ru/]Тематики
EN
сервер
Функциональное устройство, предоставляющее услуги рабочим станциям, персональным компьютерам или другим функциональным устройствам.
[РД 01.120.00-КТН-228-06]
сервер
Компьютер или приложение, предоставляющие услуги, ресурсы или данные клиентскому приложению или компьютеру.
[ http://www.morepc.ru/dict/]Основы клиент-серверных технологий
Сейчас мы хотим уточнить, что же такое сервер, какие функции он выполняет и какие вообще бывают серверы. Если речь идет о сервере, невольно всплывает в памяти понятие клиента. Все потому, что эти два понятия неразрывно связаны. Объединяет их компьютерная архитектура клиент-сервер. Обычно, когда говорят «сервер», имеют в виду сервер в архитектуре клиент-сервер, а когда говорят «клиент» – имеют в виду клиент в этой же архитектуре. Так что же это за архитектура? Суть ее в том, чтобы разделить функции между двумя подсистемами: клиентом, который отправляет запрос на выполнение каких-либо действий, и сервером, который выполняет этот запрос. Взаимодействие между клиентом и сервером происходит посредством стандартных специальных протоколов, таких как TCP/IP и z39.50. На самом деле протоколов очень много, они различаются по уровням. Мы рассмотрим только протокол прикладного уровня HTTP (чуть позднее), поскольку для решения наших программистских задач нужен только он. А пока вернемся к клиент-серверной архитектуре и разберемся, что же такое клиент и что такое сервер.
Сервер представляет собой набор программ, которые контролируют выполнение различных процессов. Соответственно, этот набор программ установлен на каком-то компьютере. Часто компьютер, на котором установлен сервер, и называют сервером. Основная функция компьютера-сервера – по запросу клиента запустить какой-либо определенный процесс и отправить клиенту результаты его работы.
Клиентом называют любой процесс, который пользуется услугами сервера. Клиентом может быть как пользователь, так и программа. Основная задача клиента – выполнение приложения и осуществление связи с сервером, когда этого требует приложение. То есть клиент должен предоставлять пользователю интерфейс для работы с приложением, реализовывать логику его работы и при необходимости отправлять задания серверу.
Взаимодействие между клиентом и сервером начинается по инициативе клиента. Клиент запрашивает вид обслуживания, устанавливает сеанс, получает нужные ему результаты и сообщает об окончании работы.
Услугами одного сервера чаще всего пользуется несколько клиентов одновременно. Поэтому каждый сервер должен иметь достаточно большую производительность и обеспечивать безопасность данных.
Логичнее всего устанавливать сервер на компьютере, входящем в какую-либо сеть, локальную или глобальную. Однако можно устанавливать сервер и на отдельно стоящий компьютер (тогда он будет являться одновременно и клиентом и сервером).[ Источник]
Существует множество типов серверов. Вот лишь некоторые из них.- Видеосервер. Такой сервер специально приспособлен к обработке изображений, хранению видеоматериалов, видеоигр и т.п. В связи с этим компьютер, на котором установлен видеосервер, должен иметь высокую производительность и большую память.
- Поисковый сервер предназначен для поиска информации в Internet.
- Почтовый сервер предоставляет услуги в ответ на запросы, присланные по электронной почте.
- Сервер WWW предназначен для работы в Internet.
- Сервер баз данных выполняет обработку запросов к базам данных.
- Сервер защиты данных предназначен для обеспечения безопасности данных (содержит, например, средства для идентификации паролей).
- Сервер приложений предназначен для выполнения прикладных процессов. С одной стороны взаимодействует с клиентами, получая задания, а с другой – работает с базами данных, подбирая необходимые для обработки данные.
- Сервер удаленного доступа обеспечивает коллективный удаленный доступ к данным.
- Файловый сервер обеспечивает функционирование распределенных ресурсов, предоставляет услуги поиска, хранения, архивирования данных и возможность одновременного доступа к ним нескольких пользователей.
Обычно на компьютере-сервере работает сразу несколько программ-серверов. Одна занимается электронной почтой, другая распределением файлов, третья предоставляет web-страницы.
Тематики
EN
сервер (сети и системы связи)
Функциональный узел в сети связи, который предоставляет данные другим функциональным узлам или выдает разрешение на доступ к своим ресурсам другим функциональным узлам, который может быть также логическим подразделом с независимым управлением своей оперативной деятельностью в пределах программного алгоритма и/или оборудования.
[ ГОСТ Р 54325-2011 (IEC/TS 61850-2:2003)]EN
server
on a communication network, a functional node that provides data to, or that allows access to its resources by, other functional nodes. A server may also be a logical subdivision, which has independent control of its operation, within the software algorithm (and/or possibly hardware) structure
[IEC 61850-2, ed. 1.0 (2003-08)]Тематики
EN
телевизионный сервер
Устройство, предназначенное для записи и воспроизведения цифровых телевизионных видеосигналов и звуковых сигналов вещательного телевидения на магнитные диски.
[ ГОСТ Р 52210-2004]Тематики
- телевидение, радиовещание, видео
Обобщающие термины
EN
2.60 сервер (server): Процессор, предоставляющий услуги одному или более другому процессору.
Источник: ГОСТ Р ИСО/МЭК ТО 10032-2007: Эталонная модель управления данными
3.66 сервер (server): Компьютер, действующий как поставщик некоторых услуг, таких как обработка коммуникаций, обеспечение интерфейса с системой хранения файлов или печатное устройство.
Источник: ГОСТ Р ИСО/ТО 13569-2007: Финансовые услуги. Рекомендации по информационной безопасности
3.66 сервер (server): Компьютер, действующий как поставщик некоторых услуг, таких как обработка коммуникаций, обеспечение интерфейса с системой хранения файлов или печатное устройство.
Источник: ГОСТ Р ИСО ТО 13569-2007: Финансовые услуги. Рекомендации по информационной безопасности
3.1.29 сервер (server): Программный объект, экспортирующий ресурс имеющихся данных. Программный объект устанавливается на физическое устройство. Компьютер, подключенный к сети и предоставляющий услуги другим устройствам, работающим в этой сети.
Источник: ГОСТ Р 53531-2009: Телевидение вещательное цифровое. Требования к защите информации от несанкционированного доступа в сетях кабельного и наземного телевизионного вещания. Основные параметры. Технические требования оригинал документа
Англо-русский словарь нормативно-технической терминологии > server
-
9 cycle
1) цикл; период2) цикличность; круговой процесс -
10 turnover
['tɜːnəʊvə]1) Общая лексика: коэффициент текучести рабочей силы, оборот, опрокидывание, отложной, полукруглый пирог или торт с начинкой, полукруглый пирог с начинкой, полукруглый торт с начинкой, реорганизация штатов, сменяемость, текучесть рабочей силы, товарооборот (включает в себя стоимость товаров и услуг, реализованных как за наличный расчёт (sales for cash), так и в кредит (sales on account). В финансовых отчетах (financial statements) этот показатель приводится за минусом скидок с про), торт с начинкой, часть газетной статьи (напечатанная на следующей странице), оборачиваемость (вход в бедность и выход из нее), выручка от реализации (чистая, без возвратов товаров и скидок), текучка (текучесть кадров)2) Биология: обновление (напр. белка)3) Устаревшее слово: переходящий от одного мастера к другому для завершения обучения, подмастерье4) Спорт: потеря мяча (в результате нарушения), перехват мяча, переворот (в борьбе)5) Военный термин: передача, перемещения, смена6) Техника: кантователь, оборачиваемость, перекидной стол (опрокидывающийся), поворот на 180 град.7) Сельское хозяйство: обмен, механизм поборота (оборотного плуга)8) Строительство: отбортовка, введение в эксплуатацию, отгиб9) Юридический термин: текучесть (рабочей силы)10) Экономика: величина оборота, налог с оборота, общий объём миграции11) Бухгалтерия: объём продаж12) Дипломатический термин: передача голосов одной партии другой13) Лесоводство: перемена состава рабочих, текучесть (личного состава), механизм поворота (оборотного плуга), оборот (предприятия, цеха)14) Металлургия: перекидной (опрокидывающийся) стол, оборачиваемость (напр. литейной формы)15) Текстиль: отложной (о воротнике)16) Сленг: ночь перед выходом из тюрьмы, число или процент ( людей или любых предметов), сменившихся за какой-то срок17) Нефть: товарооборот18) Иммунология: метаболизм, функциональный цикл (напр. клетки-киллера)19) Рыбоводство: водообмен21) Механика: поворот на 180, поворотный22) Экология: круговорот, цикл, оборот (процесс замещения одних видов другими видами)23) Деловая лексика: оборачиваемость товарных запасов, годовой объём продаж24) ЕБРР: объём реализации25) Автоматика: опрокидывающийся26) Робототехника: оборачиваемость (средств) Ч. текучесть (рабочей силы)27) Химическое оружие: сдача28) Авиационная медицина: кругооборот, сменность (кадров)29) Макаров: вращающийся, обращающийся, обращение, опрокидывающийся стол, откидной, поворот, поворот на 180 градусов, цикличный30) Золотодобыча: текучесть кадров31) Нефть и газ: сдача-приёмка32) Логистика: передавать33) Баскетбол: потеря -
11 Funktionsablauf
-
12 программируемый логический контроллер
- speicherprogrammierbare Steuerung, f
программируемый логический контроллер
ПЛК
-
[Интент]
контроллер
Управляющее устройство, осуществляющее автоматическое управление посредством программной реализации алгоритмов управления.
[Сборник рекомендуемых терминов. Выпуск 107. Теория управления.
Академия наук СССР. Комитет научно-технической терминологии. 1984 г.]EN
storage-programmable logic controller
computer-aided control equipment or system whose logic sequence can be varied via a directly or remote-control connected programming device, for example a control panel, a host computer or a portable terminal
[IEV ref 351-32-34]FR
automate programmable à mémoire
См. также:
équipement ou système de commande assisté par ordinateur dont la séquence logique peut être modifiée directement ou par l'intermédiaire d'un dispositif de programmation relié à une télécommande, par exemple un panneau de commande, un ordinateur hôte ou un terminal de données portatif
[IEV ref 351-32-34]
- архитектура контроллера;
- производительность контроллера;
- время реакции контроллера;
КЛАССИФИКАЦИЯ
Основным показателем ПЛК является количество каналов ввода-вывода. По этому признаку ПЛК делятся на следующие группы:- нано- ПЛК (менее 16 каналов);
- микро-ПЛК (более 16, до 100 каналов);
- средние (более 100, до 500 каналов);
- большие (более 500 каналов).
- моноблочными - в которых устройство ввода-вывода не может быть удалено из контроллера или заменено на другое. Конструктивно контроллер представляет собой единое целое с устройствами ввода-вывода (например, одноплатный контроллер). Моноблочный контроллер может иметь, например, 16 каналов дискретного ввода и 8 каналов релейного вывода;
- модульные - состоящие из общей корзины (шасси), в которой располагаются модуль центрального процессора и сменные модули ввода-вывода. Состав модулей выбирается пользователем в зависимости от решаемой задачи. Типовое количество слотов для сменных модулей - от 8 до 32;
- распределенные (с удаленными модулями ввода-вывода) - в которых модули ввода-вывода выполнены в отдельных корпусах, соединяются с модулем контроллера по сети (обычно на основе интерфейса RS-485) и могут быть расположены на расстоянии до 1,2 км от процессорного модуля.
Многие контроллеры имеют набор сменных процессорных плат разной производительности. Это позволяет расширить круг потенциальных пользователей системы без изменения ее конструктива.
По конструктивному исполнению и способу крепления контроллеры делятся на:- панельные (для монтажа на панель или дверцу шкафа);
- для монтажа на DIN-рейку внутри шкафа;
- для крепления на стене;
- стоечные - для монтажа в стойке;
- бескорпусные (обычно одноплатные) для применения в специализированных конструктивах производителей оборудования (OEM - "Original Equipment Manufact urer").
По области применения контроллеры делятся на следующие типы:- универсальные общепромышленные;
- для управления роботами;
- для управления позиционированием и перемещением;
- коммуникационные;
- ПИД-контроллеры;
- специализированные.
По способу программирования контроллеры бывают:- программируемые с лицевой панели контроллера;
- программируемые переносным программатором;
- программируемые с помощью дисплея, мыши и клавиатуры;
- программируемые с помощью персонального компьютера.
Контроллеры могут программироваться на следующих языках:- на классических алгоритмических языках (C, С#, Visual Basic);
- на языках МЭК 61131-3.
Контроллеры могут содержать в своем составе модули ввода-вывода или не содержать их. Примерами контроллеров без модулей ввода-вывода являются коммуникационные контроллеры, которые выполняют функцию межсетевого шлюза, или контроллеры, получающие данные от контроллеров нижнего уровня иерархии АСУ ТП. Контроллеры для систем автоматизации
Слово "контроллер" произошло от английского "control" (управление), а не от русского "контроль" (учет, проверка). Контроллером в системах автоматизации называют устройство, выполняющее управление физическими процессами по записанному в него алгоритму, с использованием информации, получаемой от датчиков и выводимой в исполнительные устройства.
Первые контроллеры появились на рубеже 60-х и 70-х годов в автомобильной промышленности, где использовались для автоматизации сборочных линий. В то время компьютеры стоили чрезвычайно дорого, поэтому контроллеры строились на жесткой логике (программировались аппаратно), что было гораздо дешевле. Однако перенастройка с одной технологической линии на другую требовала фактически изготовления нового контроллера. Поэтому появились контроллеры, алгоритм работы которых мог быть изменен несколько проще - с помощью схемы соединений реле. Такие контроллеры получили название программируемых логических контроллеров (ПЛК), и этот термин сохранился до настоящего времени. Везде ниже термины "контроллер" и "ПЛК" мы будем употреблять как синонимы.
Немного позже появились ПЛК, которые можно было программировать на машинно-ориентированном языке, что было проще конструктивно, но требовало участия специально обученного программиста для внесения даже незначительных изменений в алгоритм управления. С этого момента началась борьба за упрощение процесса программирования ПЛК, которая привела сначала к созданию языков высокого уровня, затем - специализированных языков визуального программирования, похожих на язык релейной логики. В настоящее время этот процесс завершился созданием международного стандарта IEC (МЭК) 1131-3, который позже был переименован в МЭК 61131-3. Стандарт МЭК 61131-3 поддерживает пять языков технологического программирования, что исключает необходимость привлечения профессиональных программистов при построении систем с контроллерами, оставляя для них решение нестандартных задач.
В связи с тем, что способ программирования является наиболее существенным классифицирующим признаком контроллера, понятие "ПЛК" все реже используется для обозначения управляющих контроллеров, которые не поддерживают технологические языки программирования. Жесткие ограничения на стоимость и огромное разнообразие целей автоматизации привели к невозможности создания универсального ПЛК, как это случилось с офисными компьютерами. Область автоматизации выдвигает множество задач, в соответствии с которыми развивается и рынок, содержащий сотни непохожих друг на друга контроллеров, различающихся десятками параметров.
Выбор оптимального для конкретной задачи контроллера основывается обычно на соответствии функциональных характеристик контроллера решаемой задаче при условии минимальной его стоимости. Учитываются также другие важные характеристики (температурный диапазон, надежность, бренд изготовителя, наличие разрешений Ростехнадзора, сертификатов и т. п.).
Несмотря на огромное разнообразие контроллеров, в их развитии заметны следующие общие тенденции:- уменьшение габаритов;
- расширение функциональных возможностей;
- увеличение количества поддерживаемых интерфейсов и сетей;
- использование идеологии "открытых систем";
- использование языков программирования стандарта МЭК 61131-3;
- снижение цены.
[ http://bookasutp.ru/Chapter6_1.aspx]
Программируемый логический контроллер (ПЛК, PLC) – микропроцессорное устройство, предназначенное для управления технологическим процессом и другими сложными технологическими объектами.
Принцип работы контроллера состоит в выполнение следующего цикла операций:
1. Сбор сигналов с датчиков;
2. Обработка сигналов согласно прикладному алгоритму управления;
3. Выдача управляющих воздействий на исполнительные устройства.
В нормальном режиме работы контроллер непрерывно выполняет этот цикл с частотой от 50 раз в секунду. Время, затрачиваемое контроллером на выполнение полного цикла, часто называют временем (или периодом) сканирования; в большинстве современных ПЛК сканирование может настраиваться пользователем в диапазоне от 20 до 30000 миллисекунд. Для быстрых технологических процессов, где критична скорость реакции системы и требуется оперативное регулирование, время сканирования может составлять 20 мс, однако для большинства непрерывных процессов период 100 мс считается вполне приемлемым.
Аппаратно контроллеры имеют модульную архитектуру и могут состоять из следующих компонентов:
1. Базовая панель ( Baseplate). Она служит для размещения на ней других модулей системы, устанавливаемых в специально отведенные позиции (слоты). Внутри базовой панели проходят две шины: одна - для подачи питания на электронные модули, другая – для пересылки данных и информационного обмена между модулями.
2. Модуль центрального вычислительного устройства ( СPU). Это мозг системы. Собственно в нем и происходит математическая обработка данных. Для связи с другими устройствами CPU часто оснащается сетевым интерфейсом, поддерживающим тот или иной коммуникационный стандарт.
3. Дополнительные коммуникационные модули. Необходимы для добавления сетевых интерфейсов, неподдерживаемых напрямую самим CPU. Коммуникационные модули существенно расширяют возможности ПЛК по сетевому взаимодействию. C их помощью к контроллеру подключают узлы распределенного ввода/вывода, интеллектуальные полевые приборы и станции операторского уровня.
4. Блок питания. Нужен для запитки системы от 220 V. Однако многие ПЛК не имеют стандартного блока питания и запитываются от внешнего. Рис.1. Контроллер РСУ с коммуникациями Profibus и Ethernet.
Рис.1. Контроллер РСУ с коммуникациями Profibus и Ethernet.
Иногда на базовую панель, помимо указанных выше, допускается устанавливать модули ввода/вывода полевых сигналов, которые образуют так называемый локальный ввод/вывод. Однако для большинства РСУ (DCS) характерно использование именно распределенного (удаленного) ввода/вывода.
Отличительной особенностью контроллеров, применяемых в DCS, является возможность их резервирования. Резервирование нужно для повышения отказоустойчивости системы и заключается, как правило, в дублировании аппаратных модулей системы. Рис. 2. Резервированный контроллер с коммуникациями Profibus и Ethernet.
Рис. 2. Резервированный контроллер с коммуникациями Profibus и Ethernet.
Резервируемые модули работают параллельно и выполняют одни и те же функции. При этом один модуль находится в активном состоянии, а другой, являясь резервом, – в режиме “standby”. В случае отказа активного модуля, система автоматически переключается на резерв (это называется “горячий резерв”).
Обратите внимание, контроллеры связаны шиной синхронизации, по которой они мониторят состояние друг друга. Это решение позволяет разнести резервированные модули на значительное расстояние друг от друга (например, расположить их в разных шкафах или даже аппаратных).
Допустим, в данный момент активен левый контроллер, правый – находится в резерве. При этом, даже находясь в резерве, правый контроллер располагает всеми процессными данными и выполняет те же самые математические операции, что и левый. Контроллеры синхронизированы. Предположим, случается отказ левого контроллера, а именно модуля CPU. Управление автоматически передается резервному контроллеру, и теперь он становится главным. Здесь очень большое значение имеют время, которое система тратит на переключение на резерв (обычно меньше 0.5 с) и отсутствие возмущений (удара). Теперь система работает на резерве. Как только инженер заменит отказавший модуль CPU на исправный, система автоматически передаст ему управление и возвратится в исходное состояние.
На рис. 3 изображен резервированный контроллер S7-400H производства Siemens. Данный контроллер входит в состав РСУ Simatic PCS7. Рис. 3. Резервированный контроллер S7-400H. Несколько другое техническое решение показано на примере резервированного контроллера FCP270 производства Foxboro (рис. 4). Данный контроллер входит в состав системы управления Foxboro IA Series.
Рис. 3. Резервированный контроллер S7-400H. Несколько другое техническое решение показано на примере резервированного контроллера FCP270 производства Foxboro (рис. 4). Данный контроллер входит в состав системы управления Foxboro IA Series. Рис. 4. Резервированный контроллер FCP270.
Рис. 4. Резервированный контроллер FCP270.
На базовой панели инсталлировано два процессорных модуля, работающих как резервированная пара, и коммуникационный модуль для сопряжения с оптическими сетями стандарта Ethernet. Взаимодействие между модулями происходит по внутренней шине (тоже резервированной), спрятанной непосредственно в базовую панель (ее не видно на рисунке).
На рисунке ниже показан контроллер AC800M производства ABB (часть РСУ Extended Automation System 800xA). Рис. 5. Контроллер AC800M.
Рис. 5. Контроллер AC800M.
Это не резервированный вариант. Контроллер состоит из двух коммуникационных модулей, одного СPU и одного локального модуля ввода/вывода. Кроме этого, к контроллеру можно подключить до 64 внешних модулей ввода/вывода.
При построении РСУ важно выбрать контроллер, удовлетворяющий всем техническим условиям и требованиям конкретного производства. Подбирая оптимальную конфигурацию, инженеры оперируют определенными техническими характеристиками промышленных контроллеров. Наиболее значимые перечислены ниже:
1. Возможность полного резервирования. Для задач, где отказоустойчивость критична (химия, нефтехимия, металлургия и т.д.), применение резервированных конфигураций вполне оправдано, тогда как для других менее ответственных производств резервирование зачастую оказывается избыточным решением.
2. Количество и тип поддерживаемых коммуникационных интерфейсов. Это определяет гибкость и масштабируемость системы управления в целом. Современные контроллеры способны поддерживать до 10 стандартов передачи данных одновременно, что во многом определяет их универсальность.
3. Быстродействие. Измеряется, как правило, в количестве выполняемых в секунду элементарных операций (до 200 млн.). Иногда быстродействие измеряется количеством обрабатываемых за секунду функциональных блоков (что такое функциональный блок – будет рассказано в следующей статье). Быстродействие зависит от типа центрального процессора (популярные производители - Intel, AMD, Motorola, Texas Instruments и т.д.)
4. Объем оперативной памяти. Во время работы контроллера в его оперативную память загружены запрограммированные пользователем алгоритмы автоматизированного управления, операционная система, библиотечные модули и т.д. Очевидно, чем больше оперативной памяти, тем сложнее и объемнее алгоритмы контроллер может выполнять, тем больше простора для творчества у программиста. Варьируется от 256 килобайт до 32 мегабайт.
5. Надежность. Наработка на отказ до 10-12 лет.
6. Наличие специализированных средств разработки и поддержка различных языков программирования. Очевидно, что существование специализированный среды разработки прикладных программ – это стандарт для современного контроллера АСУ ТП. Для удобства программиста реализуется поддержка сразу нескольких языков как визуального, так и текстового (процедурного) программирования (FBD, SFC, IL, LAD, ST; об этом в следующей статье).
7. Возможность изменения алгоритмов управления на “лету” (online changes), т.е. без остановки работы контроллера. Для большинства контроллеров, применяемых в РСУ, поддержка online changes жизненно необходима, так как позволяет тонко настраивать систему или расширять ее функционал прямо на работающем производстве.
8. Возможность локального ввода/вывода. Как видно из рис. 4 контроллер Foxboro FCP270 рассчитан на работу только с удаленной подсистемой ввода/вывода, подключаемой к нему по оптическим каналам. Simatic S7-400 может спокойно работать как с локальными модулями ввода/вывода (свободные слоты на базовой панели есть), так и удаленными узлами.
9. Вес, габаритные размеры, вид монтажа (на DIN-рейку, на монтажную панель или в стойку 19”). Важно учитывать при проектировании и сборке системных шкафов.
10. Условия эксплуатации (температура, влажность, механические нагрузки). Большинство промышленных контроллеров могут работать в нечеловеческих условиях от 0 до 65 °С и при влажности до 95-98%.
[ http://kazanets.narod.ru/PLC_PART1.htm]Тематики
Синонимы
EN
DE
- speicherprogrammierbare Steuerung, f
FR
Русско-немецкий словарь нормативно-технической терминологии > программируемый логический контроллер
13 automate programmable à mémoire
программируемый логический контроллер
ПЛК
-
[Интент]
контроллер
Управляющее устройство, осуществляющее автоматическое управление посредством программной реализации алгоритмов управления.
[Сборник рекомендуемых терминов. Выпуск 107. Теория управления.
Академия наук СССР. Комитет научно-технической терминологии. 1984 г.]EN
storage-programmable logic controller
computer-aided control equipment or system whose logic sequence can be varied via a directly or remote-control connected programming device, for example a control panel, a host computer or a portable terminal
[IEV ref 351-32-34]FR
automate programmable à mémoire
См. также:
équipement ou système de commande assisté par ordinateur dont la séquence logique peut être modifiée directement ou par l'intermédiaire d'un dispositif de programmation relié à une télécommande, par exemple un panneau de commande, un ordinateur hôte ou un terminal de données portatif
[IEV ref 351-32-34]
- архитектура контроллера;
- производительность контроллера;
- время реакции контроллера;
КЛАССИФИКАЦИЯ
Основным показателем ПЛК является количество каналов ввода-вывода. По этому признаку ПЛК делятся на следующие группы:- нано- ПЛК (менее 16 каналов);
- микро-ПЛК (более 16, до 100 каналов);
- средние (более 100, до 500 каналов);
- большие (более 500 каналов).
- моноблочными - в которых устройство ввода-вывода не может быть удалено из контроллера или заменено на другое. Конструктивно контроллер представляет собой единое целое с устройствами ввода-вывода (например, одноплатный контроллер). Моноблочный контроллер может иметь, например, 16 каналов дискретного ввода и 8 каналов релейного вывода;
- модульные - состоящие из общей корзины (шасси), в которой располагаются модуль центрального процессора и сменные модули ввода-вывода. Состав модулей выбирается пользователем в зависимости от решаемой задачи. Типовое количество слотов для сменных модулей - от 8 до 32;
- распределенные (с удаленными модулями ввода-вывода) - в которых модули ввода-вывода выполнены в отдельных корпусах, соединяются с модулем контроллера по сети (обычно на основе интерфейса RS-485) и могут быть расположены на расстоянии до 1,2 км от процессорного модуля.
Многие контроллеры имеют набор сменных процессорных плат разной производительности. Это позволяет расширить круг потенциальных пользователей системы без изменения ее конструктива.
По конструктивному исполнению и способу крепления контроллеры делятся на:- панельные (для монтажа на панель или дверцу шкафа);
- для монтажа на DIN-рейку внутри шкафа;
- для крепления на стене;
- стоечные - для монтажа в стойке;
- бескорпусные (обычно одноплатные) для применения в специализированных конструктивах производителей оборудования (OEM - "Original Equipment Manufact urer").
По области применения контроллеры делятся на следующие типы:- универсальные общепромышленные;
- для управления роботами;
- для управления позиционированием и перемещением;
- коммуникационные;
- ПИД-контроллеры;
- специализированные.
По способу программирования контроллеры бывают:- программируемые с лицевой панели контроллера;
- программируемые переносным программатором;
- программируемые с помощью дисплея, мыши и клавиатуры;
- программируемые с помощью персонального компьютера.
Контроллеры могут программироваться на следующих языках:- на классических алгоритмических языках (C, С#, Visual Basic);
- на языках МЭК 61131-3.
Контроллеры могут содержать в своем составе модули ввода-вывода или не содержать их. Примерами контроллеров без модулей ввода-вывода являются коммуникационные контроллеры, которые выполняют функцию межсетевого шлюза, или контроллеры, получающие данные от контроллеров нижнего уровня иерархии АСУ ТП. Контроллеры для систем автоматизации
Слово "контроллер" произошло от английского "control" (управление), а не от русского "контроль" (учет, проверка). Контроллером в системах автоматизации называют устройство, выполняющее управление физическими процессами по записанному в него алгоритму, с использованием информации, получаемой от датчиков и выводимой в исполнительные устройства.
Первые контроллеры появились на рубеже 60-х и 70-х годов в автомобильной промышленности, где использовались для автоматизации сборочных линий. В то время компьютеры стоили чрезвычайно дорого, поэтому контроллеры строились на жесткой логике (программировались аппаратно), что было гораздо дешевле. Однако перенастройка с одной технологической линии на другую требовала фактически изготовления нового контроллера. Поэтому появились контроллеры, алгоритм работы которых мог быть изменен несколько проще - с помощью схемы соединений реле. Такие контроллеры получили название программируемых логических контроллеров (ПЛК), и этот термин сохранился до настоящего времени. Везде ниже термины "контроллер" и "ПЛК" мы будем употреблять как синонимы.
Немного позже появились ПЛК, которые можно было программировать на машинно-ориентированном языке, что было проще конструктивно, но требовало участия специально обученного программиста для внесения даже незначительных изменений в алгоритм управления. С этого момента началась борьба за упрощение процесса программирования ПЛК, которая привела сначала к созданию языков высокого уровня, затем - специализированных языков визуального программирования, похожих на язык релейной логики. В настоящее время этот процесс завершился созданием международного стандарта IEC (МЭК) 1131-3, который позже был переименован в МЭК 61131-3. Стандарт МЭК 61131-3 поддерживает пять языков технологического программирования, что исключает необходимость привлечения профессиональных программистов при построении систем с контроллерами, оставляя для них решение нестандартных задач.
В связи с тем, что способ программирования является наиболее существенным классифицирующим признаком контроллера, понятие "ПЛК" все реже используется для обозначения управляющих контроллеров, которые не поддерживают технологические языки программирования. Жесткие ограничения на стоимость и огромное разнообразие целей автоматизации привели к невозможности создания универсального ПЛК, как это случилось с офисными компьютерами. Область автоматизации выдвигает множество задач, в соответствии с которыми развивается и рынок, содержащий сотни непохожих друг на друга контроллеров, различающихся десятками параметров.
Выбор оптимального для конкретной задачи контроллера основывается обычно на соответствии функциональных характеристик контроллера решаемой задаче при условии минимальной его стоимости. Учитываются также другие важные характеристики (температурный диапазон, надежность, бренд изготовителя, наличие разрешений Ростехнадзора, сертификатов и т. п.).
Несмотря на огромное разнообразие контроллеров, в их развитии заметны следующие общие тенденции:- уменьшение габаритов;
- расширение функциональных возможностей;
- увеличение количества поддерживаемых интерфейсов и сетей;
- использование идеологии "открытых систем";
- использование языков программирования стандарта МЭК 61131-3;
- снижение цены.
[ http://bookasutp.ru/Chapter6_1.aspx]
Программируемый логический контроллер (ПЛК, PLC) – микропроцессорное устройство, предназначенное для управления технологическим процессом и другими сложными технологическими объектами.
Принцип работы контроллера состоит в выполнение следующего цикла операций:
1. Сбор сигналов с датчиков;
2. Обработка сигналов согласно прикладному алгоритму управления;
3. Выдача управляющих воздействий на исполнительные устройства.
В нормальном режиме работы контроллер непрерывно выполняет этот цикл с частотой от 50 раз в секунду. Время, затрачиваемое контроллером на выполнение полного цикла, часто называют временем (или периодом) сканирования; в большинстве современных ПЛК сканирование может настраиваться пользователем в диапазоне от 20 до 30000 миллисекунд. Для быстрых технологических процессов, где критична скорость реакции системы и требуется оперативное регулирование, время сканирования может составлять 20 мс, однако для большинства непрерывных процессов период 100 мс считается вполне приемлемым.
Аппаратно контроллеры имеют модульную архитектуру и могут состоять из следующих компонентов:
1. Базовая панель ( Baseplate). Она служит для размещения на ней других модулей системы, устанавливаемых в специально отведенные позиции (слоты). Внутри базовой панели проходят две шины: одна - для подачи питания на электронные модули, другая – для пересылки данных и информационного обмена между модулями.
2. Модуль центрального вычислительного устройства ( СPU). Это мозг системы. Собственно в нем и происходит математическая обработка данных. Для связи с другими устройствами CPU часто оснащается сетевым интерфейсом, поддерживающим тот или иной коммуникационный стандарт.
3. Дополнительные коммуникационные модули. Необходимы для добавления сетевых интерфейсов, неподдерживаемых напрямую самим CPU. Коммуникационные модули существенно расширяют возможности ПЛК по сетевому взаимодействию. C их помощью к контроллеру подключают узлы распределенного ввода/вывода, интеллектуальные полевые приборы и станции операторского уровня.
4. Блок питания. Нужен для запитки системы от 220 V. Однако многие ПЛК не имеют стандартного блока питания и запитываются от внешнего.
Рис.1. Контроллер РСУ с коммуникациями Profibus и Ethernet.
Иногда на базовую панель, помимо указанных выше, допускается устанавливать модули ввода/вывода полевых сигналов, которые образуют так называемый локальный ввод/вывод. Однако для большинства РСУ (DCS) характерно использование именно распределенного (удаленного) ввода/вывода.
Отличительной особенностью контроллеров, применяемых в DCS, является возможность их резервирования. Резервирование нужно для повышения отказоустойчивости системы и заключается, как правило, в дублировании аппаратных модулей системы.
Рис. 2. Резервированный контроллер с коммуникациями Profibus и Ethernet.
Резервируемые модули работают параллельно и выполняют одни и те же функции. При этом один модуль находится в активном состоянии, а другой, являясь резервом, – в режиме “standby”. В случае отказа активного модуля, система автоматически переключается на резерв (это называется “горячий резерв”).
Обратите внимание, контроллеры связаны шиной синхронизации, по которой они мониторят состояние друг друга. Это решение позволяет разнести резервированные модули на значительное расстояние друг от друга (например, расположить их в разных шкафах или даже аппаратных).
Допустим, в данный момент активен левый контроллер, правый – находится в резерве. При этом, даже находясь в резерве, правый контроллер располагает всеми процессными данными и выполняет те же самые математические операции, что и левый. Контроллеры синхронизированы. Предположим, случается отказ левого контроллера, а именно модуля CPU. Управление автоматически передается резервному контроллеру, и теперь он становится главным. Здесь очень большое значение имеют время, которое система тратит на переключение на резерв (обычно меньше 0.5 с) и отсутствие возмущений (удара). Теперь система работает на резерве. Как только инженер заменит отказавший модуль CPU на исправный, система автоматически передаст ему управление и возвратится в исходное состояние.
На рис. 3 изображен резервированный контроллер S7-400H производства Siemens. Данный контроллер входит в состав РСУ Simatic PCS7.
Рис. 3. Резервированный контроллер S7-400H. Несколько другое техническое решение показано на примере резервированного контроллера FCP270 производства Foxboro (рис. 4). Данный контроллер входит в состав системы управления Foxboro IA Series.
Рис. 4. Резервированный контроллер FCP270.
На базовой панели инсталлировано два процессорных модуля, работающих как резервированная пара, и коммуникационный модуль для сопряжения с оптическими сетями стандарта Ethernet. Взаимодействие между модулями происходит по внутренней шине (тоже резервированной), спрятанной непосредственно в базовую панель (ее не видно на рисунке).
На рисунке ниже показан контроллер AC800M производства ABB (часть РСУ Extended Automation System 800xA).
Рис. 5. Контроллер AC800M.
Это не резервированный вариант. Контроллер состоит из двух коммуникационных модулей, одного СPU и одного локального модуля ввода/вывода. Кроме этого, к контроллеру можно подключить до 64 внешних модулей ввода/вывода.
При построении РСУ важно выбрать контроллер, удовлетворяющий всем техническим условиям и требованиям конкретного производства. Подбирая оптимальную конфигурацию, инженеры оперируют определенными техническими характеристиками промышленных контроллеров. Наиболее значимые перечислены ниже:
1. Возможность полного резервирования. Для задач, где отказоустойчивость критична (химия, нефтехимия, металлургия и т.д.), применение резервированных конфигураций вполне оправдано, тогда как для других менее ответственных производств резервирование зачастую оказывается избыточным решением.
2. Количество и тип поддерживаемых коммуникационных интерфейсов. Это определяет гибкость и масштабируемость системы управления в целом. Современные контроллеры способны поддерживать до 10 стандартов передачи данных одновременно, что во многом определяет их универсальность.
3. Быстродействие. Измеряется, как правило, в количестве выполняемых в секунду элементарных операций (до 200 млн.). Иногда быстродействие измеряется количеством обрабатываемых за секунду функциональных блоков (что такое функциональный блок – будет рассказано в следующей статье). Быстродействие зависит от типа центрального процессора (популярные производители - Intel, AMD, Motorola, Texas Instruments и т.д.)
4. Объем оперативной памяти. Во время работы контроллера в его оперативную память загружены запрограммированные пользователем алгоритмы автоматизированного управления, операционная система, библиотечные модули и т.д. Очевидно, чем больше оперативной памяти, тем сложнее и объемнее алгоритмы контроллер может выполнять, тем больше простора для творчества у программиста. Варьируется от 256 килобайт до 32 мегабайт.
5. Надежность. Наработка на отказ до 10-12 лет.
6. Наличие специализированных средств разработки и поддержка различных языков программирования. Очевидно, что существование специализированный среды разработки прикладных программ – это стандарт для современного контроллера АСУ ТП. Для удобства программиста реализуется поддержка сразу нескольких языков как визуального, так и текстового (процедурного) программирования (FBD, SFC, IL, LAD, ST; об этом в следующей статье).
7. Возможность изменения алгоритмов управления на “лету” (online changes), т.е. без остановки работы контроллера. Для большинства контроллеров, применяемых в РСУ, поддержка online changes жизненно необходима, так как позволяет тонко настраивать систему или расширять ее функционал прямо на работающем производстве.
8. Возможность локального ввода/вывода. Как видно из рис. 4 контроллер Foxboro FCP270 рассчитан на работу только с удаленной подсистемой ввода/вывода, подключаемой к нему по оптическим каналам. Simatic S7-400 может спокойно работать как с локальными модулями ввода/вывода (свободные слоты на базовой панели есть), так и удаленными узлами.
9. Вес, габаритные размеры, вид монтажа (на DIN-рейку, на монтажную панель или в стойку 19”). Важно учитывать при проектировании и сборке системных шкафов.
10. Условия эксплуатации (температура, влажность, механические нагрузки). Большинство промышленных контроллеров могут работать в нечеловеческих условиях от 0 до 65 °С и при влажности до 95-98%.
[ http://kazanets.narod.ru/PLC_PART1.htm]Тематики
Синонимы
EN
DE
- speicherprogrammierbare Steuerung, f
FR
Франко-русский словарь нормативно-технической терминологии > automate programmable à mémoire
14 speicherprogrammierbare Steuerung, f
программируемый логический контроллер
ПЛК
-
[Интент]
контроллер
Управляющее устройство, осуществляющее автоматическое управление посредством программной реализации алгоритмов управления.
[Сборник рекомендуемых терминов. Выпуск 107. Теория управления.
Академия наук СССР. Комитет научно-технической терминологии. 1984 г.]EN
storage-programmable logic controller
computer-aided control equipment or system whose logic sequence can be varied via a directly or remote-control connected programming device, for example a control panel, a host computer or a portable terminal
[IEV ref 351-32-34]FR
automate programmable à mémoire
См. также:
équipement ou système de commande assisté par ordinateur dont la séquence logique peut être modifiée directement ou par l'intermédiaire d'un dispositif de programmation relié à une télécommande, par exemple un panneau de commande, un ordinateur hôte ou un terminal de données portatif
[IEV ref 351-32-34]
- архитектура контроллера;
- производительность контроллера;
- время реакции контроллера;
КЛАССИФИКАЦИЯ
Основным показателем ПЛК является количество каналов ввода-вывода. По этому признаку ПЛК делятся на следующие группы:- нано- ПЛК (менее 16 каналов);
- микро-ПЛК (более 16, до 100 каналов);
- средние (более 100, до 500 каналов);
- большие (более 500 каналов).
- моноблочными - в которых устройство ввода-вывода не может быть удалено из контроллера или заменено на другое. Конструктивно контроллер представляет собой единое целое с устройствами ввода-вывода (например, одноплатный контроллер). Моноблочный контроллер может иметь, например, 16 каналов дискретного ввода и 8 каналов релейного вывода;
- модульные - состоящие из общей корзины (шасси), в которой располагаются модуль центрального процессора и сменные модули ввода-вывода. Состав модулей выбирается пользователем в зависимости от решаемой задачи. Типовое количество слотов для сменных модулей - от 8 до 32;
- распределенные (с удаленными модулями ввода-вывода) - в которых модули ввода-вывода выполнены в отдельных корпусах, соединяются с модулем контроллера по сети (обычно на основе интерфейса RS-485) и могут быть расположены на расстоянии до 1,2 км от процессорного модуля.
Многие контроллеры имеют набор сменных процессорных плат разной производительности. Это позволяет расширить круг потенциальных пользователей системы без изменения ее конструктива.
По конструктивному исполнению и способу крепления контроллеры делятся на:- панельные (для монтажа на панель или дверцу шкафа);
- для монтажа на DIN-рейку внутри шкафа;
- для крепления на стене;
- стоечные - для монтажа в стойке;
- бескорпусные (обычно одноплатные) для применения в специализированных конструктивах производителей оборудования (OEM - "Original Equipment Manufact urer").
По области применения контроллеры делятся на следующие типы:- универсальные общепромышленные;
- для управления роботами;
- для управления позиционированием и перемещением;
- коммуникационные;
- ПИД-контроллеры;
- специализированные.
По способу программирования контроллеры бывают:- программируемые с лицевой панели контроллера;
- программируемые переносным программатором;
- программируемые с помощью дисплея, мыши и клавиатуры;
- программируемые с помощью персонального компьютера.
Контроллеры могут программироваться на следующих языках:- на классических алгоритмических языках (C, С#, Visual Basic);
- на языках МЭК 61131-3.
Контроллеры могут содержать в своем составе модули ввода-вывода или не содержать их. Примерами контроллеров без модулей ввода-вывода являются коммуникационные контроллеры, которые выполняют функцию межсетевого шлюза, или контроллеры, получающие данные от контроллеров нижнего уровня иерархии АСУ ТП. Контроллеры для систем автоматизации
Слово "контроллер" произошло от английского "control" (управление), а не от русского "контроль" (учет, проверка). Контроллером в системах автоматизации называют устройство, выполняющее управление физическими процессами по записанному в него алгоритму, с использованием информации, получаемой от датчиков и выводимой в исполнительные устройства.
Первые контроллеры появились на рубеже 60-х и 70-х годов в автомобильной промышленности, где использовались для автоматизации сборочных линий. В то время компьютеры стоили чрезвычайно дорого, поэтому контроллеры строились на жесткой логике (программировались аппаратно), что было гораздо дешевле. Однако перенастройка с одной технологической линии на другую требовала фактически изготовления нового контроллера. Поэтому появились контроллеры, алгоритм работы которых мог быть изменен несколько проще - с помощью схемы соединений реле. Такие контроллеры получили название программируемых логических контроллеров (ПЛК), и этот термин сохранился до настоящего времени. Везде ниже термины "контроллер" и "ПЛК" мы будем употреблять как синонимы.
Немного позже появились ПЛК, которые можно было программировать на машинно-ориентированном языке, что было проще конструктивно, но требовало участия специально обученного программиста для внесения даже незначительных изменений в алгоритм управления. С этого момента началась борьба за упрощение процесса программирования ПЛК, которая привела сначала к созданию языков высокого уровня, затем - специализированных языков визуального программирования, похожих на язык релейной логики. В настоящее время этот процесс завершился созданием международного стандарта IEC (МЭК) 1131-3, который позже был переименован в МЭК 61131-3. Стандарт МЭК 61131-3 поддерживает пять языков технологического программирования, что исключает необходимость привлечения профессиональных программистов при построении систем с контроллерами, оставляя для них решение нестандартных задач.
В связи с тем, что способ программирования является наиболее существенным классифицирующим признаком контроллера, понятие "ПЛК" все реже используется для обозначения управляющих контроллеров, которые не поддерживают технологические языки программирования. Жесткие ограничения на стоимость и огромное разнообразие целей автоматизации привели к невозможности создания универсального ПЛК, как это случилось с офисными компьютерами. Область автоматизации выдвигает множество задач, в соответствии с которыми развивается и рынок, содержащий сотни непохожих друг на друга контроллеров, различающихся десятками параметров.
Выбор оптимального для конкретной задачи контроллера основывается обычно на соответствии функциональных характеристик контроллера решаемой задаче при условии минимальной его стоимости. Учитываются также другие важные характеристики (температурный диапазон, надежность, бренд изготовителя, наличие разрешений Ростехнадзора, сертификатов и т. п.).
Несмотря на огромное разнообразие контроллеров, в их развитии заметны следующие общие тенденции:- уменьшение габаритов;
- расширение функциональных возможностей;
- увеличение количества поддерживаемых интерфейсов и сетей;
- использование идеологии "открытых систем";
- использование языков программирования стандарта МЭК 61131-3;
- снижение цены.
[ http://bookasutp.ru/Chapter6_1.aspx]
Программируемый логический контроллер (ПЛК, PLC) – микропроцессорное устройство, предназначенное для управления технологическим процессом и другими сложными технологическими объектами.
Принцип работы контроллера состоит в выполнение следующего цикла операций:
1. Сбор сигналов с датчиков;
2. Обработка сигналов согласно прикладному алгоритму управления;
3. Выдача управляющих воздействий на исполнительные устройства.
В нормальном режиме работы контроллер непрерывно выполняет этот цикл с частотой от 50 раз в секунду. Время, затрачиваемое контроллером на выполнение полного цикла, часто называют временем (или периодом) сканирования; в большинстве современных ПЛК сканирование может настраиваться пользователем в диапазоне от 20 до 30000 миллисекунд. Для быстрых технологических процессов, где критична скорость реакции системы и требуется оперативное регулирование, время сканирования может составлять 20 мс, однако для большинства непрерывных процессов период 100 мс считается вполне приемлемым.
Аппаратно контроллеры имеют модульную архитектуру и могут состоять из следующих компонентов:
1. Базовая панель ( Baseplate). Она служит для размещения на ней других модулей системы, устанавливаемых в специально отведенные позиции (слоты). Внутри базовой панели проходят две шины: одна - для подачи питания на электронные модули, другая – для пересылки данных и информационного обмена между модулями.
2. Модуль центрального вычислительного устройства ( СPU). Это мозг системы. Собственно в нем и происходит математическая обработка данных. Для связи с другими устройствами CPU часто оснащается сетевым интерфейсом, поддерживающим тот или иной коммуникационный стандарт.
3. Дополнительные коммуникационные модули. Необходимы для добавления сетевых интерфейсов, неподдерживаемых напрямую самим CPU. Коммуникационные модули существенно расширяют возможности ПЛК по сетевому взаимодействию. C их помощью к контроллеру подключают узлы распределенного ввода/вывода, интеллектуальные полевые приборы и станции операторского уровня.
4. Блок питания. Нужен для запитки системы от 220 V. Однако многие ПЛК не имеют стандартного блока питания и запитываются от внешнего.
Рис.1. Контроллер РСУ с коммуникациями Profibus и Ethernet.
Иногда на базовую панель, помимо указанных выше, допускается устанавливать модули ввода/вывода полевых сигналов, которые образуют так называемый локальный ввод/вывод. Однако для большинства РСУ (DCS) характерно использование именно распределенного (удаленного) ввода/вывода.
Отличительной особенностью контроллеров, применяемых в DCS, является возможность их резервирования. Резервирование нужно для повышения отказоустойчивости системы и заключается, как правило, в дублировании аппаратных модулей системы.
Рис. 2. Резервированный контроллер с коммуникациями Profibus и Ethernet.
Резервируемые модули работают параллельно и выполняют одни и те же функции. При этом один модуль находится в активном состоянии, а другой, являясь резервом, – в режиме “standby”. В случае отказа активного модуля, система автоматически переключается на резерв (это называется “горячий резерв”).
Обратите внимание, контроллеры связаны шиной синхронизации, по которой они мониторят состояние друг друга. Это решение позволяет разнести резервированные модули на значительное расстояние друг от друга (например, расположить их в разных шкафах или даже аппаратных).
Допустим, в данный момент активен левый контроллер, правый – находится в резерве. При этом, даже находясь в резерве, правый контроллер располагает всеми процессными данными и выполняет те же самые математические операции, что и левый. Контроллеры синхронизированы. Предположим, случается отказ левого контроллера, а именно модуля CPU. Управление автоматически передается резервному контроллеру, и теперь он становится главным. Здесь очень большое значение имеют время, которое система тратит на переключение на резерв (обычно меньше 0.5 с) и отсутствие возмущений (удара). Теперь система работает на резерве. Как только инженер заменит отказавший модуль CPU на исправный, система автоматически передаст ему управление и возвратится в исходное состояние.
На рис. 3 изображен резервированный контроллер S7-400H производства Siemens. Данный контроллер входит в состав РСУ Simatic PCS7.
Рис. 3. Резервированный контроллер S7-400H. Несколько другое техническое решение показано на примере резервированного контроллера FCP270 производства Foxboro (рис. 4). Данный контроллер входит в состав системы управления Foxboro IA Series.
Рис. 4. Резервированный контроллер FCP270.
На базовой панели инсталлировано два процессорных модуля, работающих как резервированная пара, и коммуникационный модуль для сопряжения с оптическими сетями стандарта Ethernet. Взаимодействие между модулями происходит по внутренней шине (тоже резервированной), спрятанной непосредственно в базовую панель (ее не видно на рисунке).
На рисунке ниже показан контроллер AC800M производства ABB (часть РСУ Extended Automation System 800xA).
Рис. 5. Контроллер AC800M.
Это не резервированный вариант. Контроллер состоит из двух коммуникационных модулей, одного СPU и одного локального модуля ввода/вывода. Кроме этого, к контроллеру можно подключить до 64 внешних модулей ввода/вывода.
При построении РСУ важно выбрать контроллер, удовлетворяющий всем техническим условиям и требованиям конкретного производства. Подбирая оптимальную конфигурацию, инженеры оперируют определенными техническими характеристиками промышленных контроллеров. Наиболее значимые перечислены ниже:
1. Возможность полного резервирования. Для задач, где отказоустойчивость критична (химия, нефтехимия, металлургия и т.д.), применение резервированных конфигураций вполне оправдано, тогда как для других менее ответственных производств резервирование зачастую оказывается избыточным решением.
2. Количество и тип поддерживаемых коммуникационных интерфейсов. Это определяет гибкость и масштабируемость системы управления в целом. Современные контроллеры способны поддерживать до 10 стандартов передачи данных одновременно, что во многом определяет их универсальность.
3. Быстродействие. Измеряется, как правило, в количестве выполняемых в секунду элементарных операций (до 200 млн.). Иногда быстродействие измеряется количеством обрабатываемых за секунду функциональных блоков (что такое функциональный блок – будет рассказано в следующей статье). Быстродействие зависит от типа центрального процессора (популярные производители - Intel, AMD, Motorola, Texas Instruments и т.д.)
4. Объем оперативной памяти. Во время работы контроллера в его оперативную память загружены запрограммированные пользователем алгоритмы автоматизированного управления, операционная система, библиотечные модули и т.д. Очевидно, чем больше оперативной памяти, тем сложнее и объемнее алгоритмы контроллер может выполнять, тем больше простора для творчества у программиста. Варьируется от 256 килобайт до 32 мегабайт.
5. Надежность. Наработка на отказ до 10-12 лет.
6. Наличие специализированных средств разработки и поддержка различных языков программирования. Очевидно, что существование специализированный среды разработки прикладных программ – это стандарт для современного контроллера АСУ ТП. Для удобства программиста реализуется поддержка сразу нескольких языков как визуального, так и текстового (процедурного) программирования (FBD, SFC, IL, LAD, ST; об этом в следующей статье).
7. Возможность изменения алгоритмов управления на “лету” (online changes), т.е. без остановки работы контроллера. Для большинства контроллеров, применяемых в РСУ, поддержка online changes жизненно необходима, так как позволяет тонко настраивать систему или расширять ее функционал прямо на работающем производстве.
8. Возможность локального ввода/вывода. Как видно из рис. 4 контроллер Foxboro FCP270 рассчитан на работу только с удаленной подсистемой ввода/вывода, подключаемой к нему по оптическим каналам. Simatic S7-400 может спокойно работать как с локальными модулями ввода/вывода (свободные слоты на базовой панели есть), так и удаленными узлами.
9. Вес, габаритные размеры, вид монтажа (на DIN-рейку, на монтажную панель или в стойку 19”). Важно учитывать при проектировании и сборке системных шкафов.
10. Условия эксплуатации (температура, влажность, механические нагрузки). Большинство промышленных контроллеров могут работать в нечеловеческих условиях от 0 до 65 °С и при влажности до 95-98%.
[ http://kazanets.narod.ru/PLC_PART1.htm]Тематики
Синонимы
EN
DE
- speicherprogrammierbare Steuerung, f
FR
Немецко-русский словарь нормативно-технической терминологии > speicherprogrammierbare Steuerung, f
15 программируемый логический контроллер
программируемый логический контроллер
ПЛК
-
[Интент]
контроллер
Управляющее устройство, осуществляющее автоматическое управление посредством программной реализации алгоритмов управления.
[Сборник рекомендуемых терминов. Выпуск 107. Теория управления.
Академия наук СССР. Комитет научно-технической терминологии. 1984 г.]EN
storage-programmable logic controller
computer-aided control equipment or system whose logic sequence can be varied via a directly or remote-control connected programming device, for example a control panel, a host computer or a portable terminal
[IEV ref 351-32-34]FR
automate programmable à mémoire
См. также:
équipement ou système de commande assisté par ordinateur dont la séquence logique peut être modifiée directement ou par l'intermédiaire d'un dispositif de programmation relié à une télécommande, par exemple un panneau de commande, un ordinateur hôte ou un terminal de données portatif
[IEV ref 351-32-34]
- архитектура контроллера;
- производительность контроллера;
- время реакции контроллера;
КЛАССИФИКАЦИЯ
Основным показателем ПЛК является количество каналов ввода-вывода. По этому признаку ПЛК делятся на следующие группы:- нано- ПЛК (менее 16 каналов);
- микро-ПЛК (более 16, до 100 каналов);
- средние (более 100, до 500 каналов);
- большие (более 500 каналов).
- моноблочными - в которых устройство ввода-вывода не может быть удалено из контроллера или заменено на другое. Конструктивно контроллер представляет собой единое целое с устройствами ввода-вывода (например, одноплатный контроллер). Моноблочный контроллер может иметь, например, 16 каналов дискретного ввода и 8 каналов релейного вывода;
- модульные - состоящие из общей корзины (шасси), в которой располагаются модуль центрального процессора и сменные модули ввода-вывода. Состав модулей выбирается пользователем в зависимости от решаемой задачи. Типовое количество слотов для сменных модулей - от 8 до 32;
- распределенные (с удаленными модулями ввода-вывода) - в которых модули ввода-вывода выполнены в отдельных корпусах, соединяются с модулем контроллера по сети (обычно на основе интерфейса RS-485) и могут быть расположены на расстоянии до 1,2 км от процессорного модуля.
Многие контроллеры имеют набор сменных процессорных плат разной производительности. Это позволяет расширить круг потенциальных пользователей системы без изменения ее конструктива.
По конструктивному исполнению и способу крепления контроллеры делятся на:- панельные (для монтажа на панель или дверцу шкафа);
- для монтажа на DIN-рейку внутри шкафа;
- для крепления на стене;
- стоечные - для монтажа в стойке;
- бескорпусные (обычно одноплатные) для применения в специализированных конструктивах производителей оборудования (OEM - "Original Equipment Manufact urer").
По области применения контроллеры делятся на следующие типы:- универсальные общепромышленные;
- для управления роботами;
- для управления позиционированием и перемещением;
- коммуникационные;
- ПИД-контроллеры;
- специализированные.
По способу программирования контроллеры бывают:- программируемые с лицевой панели контроллера;
- программируемые переносным программатором;
- программируемые с помощью дисплея, мыши и клавиатуры;
- программируемые с помощью персонального компьютера.
Контроллеры могут программироваться на следующих языках:- на классических алгоритмических языках (C, С#, Visual Basic);
- на языках МЭК 61131-3.
Контроллеры могут содержать в своем составе модули ввода-вывода или не содержать их. Примерами контроллеров без модулей ввода-вывода являются коммуникационные контроллеры, которые выполняют функцию межсетевого шлюза, или контроллеры, получающие данные от контроллеров нижнего уровня иерархии АСУ ТП. Контроллеры для систем автоматизации
Слово "контроллер" произошло от английского "control" (управление), а не от русского "контроль" (учет, проверка). Контроллером в системах автоматизации называют устройство, выполняющее управление физическими процессами по записанному в него алгоритму, с использованием информации, получаемой от датчиков и выводимой в исполнительные устройства.
Первые контроллеры появились на рубеже 60-х и 70-х годов в автомобильной промышленности, где использовались для автоматизации сборочных линий. В то время компьютеры стоили чрезвычайно дорого, поэтому контроллеры строились на жесткой логике (программировались аппаратно), что было гораздо дешевле. Однако перенастройка с одной технологической линии на другую требовала фактически изготовления нового контроллера. Поэтому появились контроллеры, алгоритм работы которых мог быть изменен несколько проще - с помощью схемы соединений реле. Такие контроллеры получили название программируемых логических контроллеров (ПЛК), и этот термин сохранился до настоящего времени. Везде ниже термины "контроллер" и "ПЛК" мы будем употреблять как синонимы.
Немного позже появились ПЛК, которые можно было программировать на машинно-ориентированном языке, что было проще конструктивно, но требовало участия специально обученного программиста для внесения даже незначительных изменений в алгоритм управления. С этого момента началась борьба за упрощение процесса программирования ПЛК, которая привела сначала к созданию языков высокого уровня, затем - специализированных языков визуального программирования, похожих на язык релейной логики. В настоящее время этот процесс завершился созданием международного стандарта IEC (МЭК) 1131-3, который позже был переименован в МЭК 61131-3. Стандарт МЭК 61131-3 поддерживает пять языков технологического программирования, что исключает необходимость привлечения профессиональных программистов при построении систем с контроллерами, оставляя для них решение нестандартных задач.
В связи с тем, что способ программирования является наиболее существенным классифицирующим признаком контроллера, понятие "ПЛК" все реже используется для обозначения управляющих контроллеров, которые не поддерживают технологические языки программирования. Жесткие ограничения на стоимость и огромное разнообразие целей автоматизации привели к невозможности создания универсального ПЛК, как это случилось с офисными компьютерами. Область автоматизации выдвигает множество задач, в соответствии с которыми развивается и рынок, содержащий сотни непохожих друг на друга контроллеров, различающихся десятками параметров.
Выбор оптимального для конкретной задачи контроллера основывается обычно на соответствии функциональных характеристик контроллера решаемой задаче при условии минимальной его стоимости. Учитываются также другие важные характеристики (температурный диапазон, надежность, бренд изготовителя, наличие разрешений Ростехнадзора, сертификатов и т. п.).
Несмотря на огромное разнообразие контроллеров, в их развитии заметны следующие общие тенденции:- уменьшение габаритов;
- расширение функциональных возможностей;
- увеличение количества поддерживаемых интерфейсов и сетей;
- использование идеологии "открытых систем";
- использование языков программирования стандарта МЭК 61131-3;
- снижение цены.
[ http://bookasutp.ru/Chapter6_1.aspx]
Программируемый логический контроллер (ПЛК, PLC) – микропроцессорное устройство, предназначенное для управления технологическим процессом и другими сложными технологическими объектами.
Принцип работы контроллера состоит в выполнение следующего цикла операций:
1. Сбор сигналов с датчиков;
2. Обработка сигналов согласно прикладному алгоритму управления;
3. Выдача управляющих воздействий на исполнительные устройства.
В нормальном режиме работы контроллер непрерывно выполняет этот цикл с частотой от 50 раз в секунду. Время, затрачиваемое контроллером на выполнение полного цикла, часто называют временем (или периодом) сканирования; в большинстве современных ПЛК сканирование может настраиваться пользователем в диапазоне от 20 до 30000 миллисекунд. Для быстрых технологических процессов, где критична скорость реакции системы и требуется оперативное регулирование, время сканирования может составлять 20 мс, однако для большинства непрерывных процессов период 100 мс считается вполне приемлемым.
Аппаратно контроллеры имеют модульную архитектуру и могут состоять из следующих компонентов:
1. Базовая панель ( Baseplate). Она служит для размещения на ней других модулей системы, устанавливаемых в специально отведенные позиции (слоты). Внутри базовой панели проходят две шины: одна - для подачи питания на электронные модули, другая – для пересылки данных и информационного обмена между модулями.
2. Модуль центрального вычислительного устройства ( СPU). Это мозг системы. Собственно в нем и происходит математическая обработка данных. Для связи с другими устройствами CPU часто оснащается сетевым интерфейсом, поддерживающим тот или иной коммуникационный стандарт.
3. Дополнительные коммуникационные модули. Необходимы для добавления сетевых интерфейсов, неподдерживаемых напрямую самим CPU. Коммуникационные модули существенно расширяют возможности ПЛК по сетевому взаимодействию. C их помощью к контроллеру подключают узлы распределенного ввода/вывода, интеллектуальные полевые приборы и станции операторского уровня.
4. Блок питания. Нужен для запитки системы от 220 V. Однако многие ПЛК не имеют стандартного блока питания и запитываются от внешнего.
Рис.1. Контроллер РСУ с коммуникациями Profibus и Ethernet.
Иногда на базовую панель, помимо указанных выше, допускается устанавливать модули ввода/вывода полевых сигналов, которые образуют так называемый локальный ввод/вывод. Однако для большинства РСУ (DCS) характерно использование именно распределенного (удаленного) ввода/вывода.
Отличительной особенностью контроллеров, применяемых в DCS, является возможность их резервирования. Резервирование нужно для повышения отказоустойчивости системы и заключается, как правило, в дублировании аппаратных модулей системы.
Рис. 2. Резервированный контроллер с коммуникациями Profibus и Ethernet.
Резервируемые модули работают параллельно и выполняют одни и те же функции. При этом один модуль находится в активном состоянии, а другой, являясь резервом, – в режиме “standby”. В случае отказа активного модуля, система автоматически переключается на резерв (это называется “горячий резерв”).
Обратите внимание, контроллеры связаны шиной синхронизации, по которой они мониторят состояние друг друга. Это решение позволяет разнести резервированные модули на значительное расстояние друг от друга (например, расположить их в разных шкафах или даже аппаратных).
Допустим, в данный момент активен левый контроллер, правый – находится в резерве. При этом, даже находясь в резерве, правый контроллер располагает всеми процессными данными и выполняет те же самые математические операции, что и левый. Контроллеры синхронизированы. Предположим, случается отказ левого контроллера, а именно модуля CPU. Управление автоматически передается резервному контроллеру, и теперь он становится главным. Здесь очень большое значение имеют время, которое система тратит на переключение на резерв (обычно меньше 0.5 с) и отсутствие возмущений (удара). Теперь система работает на резерве. Как только инженер заменит отказавший модуль CPU на исправный, система автоматически передаст ему управление и возвратится в исходное состояние.
На рис. 3 изображен резервированный контроллер S7-400H производства Siemens. Данный контроллер входит в состав РСУ Simatic PCS7.
Рис. 3. Резервированный контроллер S7-400H. Несколько другое техническое решение показано на примере резервированного контроллера FCP270 производства Foxboro (рис. 4). Данный контроллер входит в состав системы управления Foxboro IA Series.
Рис. 4. Резервированный контроллер FCP270.
На базовой панели инсталлировано два процессорных модуля, работающих как резервированная пара, и коммуникационный модуль для сопряжения с оптическими сетями стандарта Ethernet. Взаимодействие между модулями происходит по внутренней шине (тоже резервированной), спрятанной непосредственно в базовую панель (ее не видно на рисунке).
На рисунке ниже показан контроллер AC800M производства ABB (часть РСУ Extended Automation System 800xA).
Рис. 5. Контроллер AC800M.
Это не резервированный вариант. Контроллер состоит из двух коммуникационных модулей, одного СPU и одного локального модуля ввода/вывода. Кроме этого, к контроллеру можно подключить до 64 внешних модулей ввода/вывода.
При построении РСУ важно выбрать контроллер, удовлетворяющий всем техническим условиям и требованиям конкретного производства. Подбирая оптимальную конфигурацию, инженеры оперируют определенными техническими характеристиками промышленных контроллеров. Наиболее значимые перечислены ниже:
1. Возможность полного резервирования. Для задач, где отказоустойчивость критична (химия, нефтехимия, металлургия и т.д.), применение резервированных конфигураций вполне оправдано, тогда как для других менее ответственных производств резервирование зачастую оказывается избыточным решением.
2. Количество и тип поддерживаемых коммуникационных интерфейсов. Это определяет гибкость и масштабируемость системы управления в целом. Современные контроллеры способны поддерживать до 10 стандартов передачи данных одновременно, что во многом определяет их универсальность.
3. Быстродействие. Измеряется, как правило, в количестве выполняемых в секунду элементарных операций (до 200 млн.). Иногда быстродействие измеряется количеством обрабатываемых за секунду функциональных блоков (что такое функциональный блок – будет рассказано в следующей статье). Быстродействие зависит от типа центрального процессора (популярные производители - Intel, AMD, Motorola, Texas Instruments и т.д.)
4. Объем оперативной памяти. Во время работы контроллера в его оперативную память загружены запрограммированные пользователем алгоритмы автоматизированного управления, операционная система, библиотечные модули и т.д. Очевидно, чем больше оперативной памяти, тем сложнее и объемнее алгоритмы контроллер может выполнять, тем больше простора для творчества у программиста. Варьируется от 256 килобайт до 32 мегабайт.
5. Надежность. Наработка на отказ до 10-12 лет.
6. Наличие специализированных средств разработки и поддержка различных языков программирования. Очевидно, что существование специализированный среды разработки прикладных программ – это стандарт для современного контроллера АСУ ТП. Для удобства программиста реализуется поддержка сразу нескольких языков как визуального, так и текстового (процедурного) программирования (FBD, SFC, IL, LAD, ST; об этом в следующей статье).
7. Возможность изменения алгоритмов управления на “лету” (online changes), т.е. без остановки работы контроллера. Для большинства контроллеров, применяемых в РСУ, поддержка online changes жизненно необходима, так как позволяет тонко настраивать систему или расширять ее функционал прямо на работающем производстве.
8. Возможность локального ввода/вывода. Как видно из рис. 4 контроллер Foxboro FCP270 рассчитан на работу только с удаленной подсистемой ввода/вывода, подключаемой к нему по оптическим каналам. Simatic S7-400 может спокойно работать как с локальными модулями ввода/вывода (свободные слоты на базовой панели есть), так и удаленными узлами.
9. Вес, габаритные размеры, вид монтажа (на DIN-рейку, на монтажную панель или в стойку 19”). Важно учитывать при проектировании и сборке системных шкафов.
10. Условия эксплуатации (температура, влажность, механические нагрузки). Большинство промышленных контроллеров могут работать в нечеловеческих условиях от 0 до 65 °С и при влажности до 95-98%.
[ http://kazanets.narod.ru/PLC_PART1.htm]Тематики
Синонимы
EN
DE
- speicherprogrammierbare Steuerung, f
FR
Русско-английский словарь нормативно-технической терминологии > программируемый логический контроллер
16 системный анализ
системный анализ
Совокупность методологических средств, используемых для подготовки и обоснования решений по сложным проблемам различного характера. Он опирается на системный подход, а также на ряд математических методов и современных методов управления. Основная процедура – построение обобщенной модели, отображающей взаимосвязи реальной ситуации. [http://www.rol.ru/files/dict/internet/#P].
[ http://www.morepc.ru/dict/]
системный анализ
1. Научная дисциплина, разрабатывающая общие принципы исследования сложных объектов с учетом их системного характера. 2. Методология исследования объектов посредством представления их в качестве систем и анализа этих систем. Как научную дисциплину С.а. можно считать развитием идей кибернетики. Как и кибернетика, он исследует категории, общие для многих дисциплин и относящиеся к так называемым системам, которые изучаются любой наукой. Когда речь идет об изучении действующих, развивающихся систем, какими являются и любой экономический объект, и экономика в целом, то системное исследование может иметь два аспекта — генетический и функциональный, т.е. изучение исторического развития системы и изучение ее реального действия, функционирования. Будучи методологией исследования объектов посредством представления их в качестве систем и анализа этих систем, С.а. представляет собой весьма эффективное средство решения сложных, обычно недостаточно четко сформулированных проблем в науке, на производстве и в других областях. При этом любой объект рассматривается не как единое, неразделимое целое, а как система взаимосвязанных составных элементов, их свойств, качеств. Например, в экономике отдельные стороны, характеризующие данный экономический процесс, рассматриваются как элементы системы, изучается их взаимосвязь. Соответственно С.а. сводится к уточнению сложной проблемы и ее структуризации в серию задач, решаемых с помощью экономико-математических методов, нахождению критериев их решения, детализации целей, конструированию эффективной организации для достижения целей. С.а. любого объекта проводится в несколько этапов. Главные из них следующие: 1. Постановка задачи — определение объекта исследования, постановка целей, задание критериев для изучения объекта и управления им. 2. Выделение системы, подлежащей изучению, и ее структуризация. 3. Составление математической модели изучаемой системы: параметризация, установление зависимостей между введенными параметрами, упрощение описания системы путем выделения подсистем и определения их иерархии, окончательная фиксация целей и критериев. Таким образом, создается модель системы, которая помогает лучше ее понять, выделить главное — то, благодаря чему можно поставить и решить задачу. Такую модель называют также абстрактной системой. Результаты исследования абстрактной системы по определенным правилам можно перенести на реальные изучаемые системы (объекты исследования). В этом смысл применения С.а. прежде всего при решении сложных проблем управления (сложных в том смысле, что требуют выбора наилучших альтернатив в условиях неполноты информации, неопределенности и т.п.). С.а. применяется, в частности, при проектировании организационных структур управления (здесь одно из правил заключается в том, что необходимо строить оргструктуры в зависимости от задачи и методов решения, а не наоборот, как обычно бывает на практике), при выборе альтернатив путем сопоставления затрат на реализацию возможных альтернатив с их ожидаемой эффективностью — такие методики, например, в США называются анализом “затраты-эффективность”, “затраты-выгоды” и др. Системный подход к изучению экономических явлений [systems approach in eco¬nomics] - “комплексное изучение экономики как единого целого с позиций системного анализа”[1]. Можно встретить двоякое понимание С.п.: с одной стороны, это — рассмотрение, анализ существующих систем, с другой — создание или, как часто говорят, конструирование, синтез систем для достижения каких-то целей. Эта двойственность отражает реальное положение дел. Анализ и синтез тесно связаны. Рассмотрим в качестве примера автоматизированную систему управления (АСУ). Ее создание — синтез системы — невозможно без анализа реальных процессов управления, взаимодействия отдельных звеньев предприятия, самого предприятия с внешним миром и т.д. Поскольку главная отличительная особенность большой или сложной системы — тесная взаимосвязь всех ее эле¬ментов и частей, то С.п. к анализу экономических явлений означает учет этих взаимосвязей, изучение отдельных экономических объектов как структурных частей более сложных систем, выявление роли каждого из них в общем процессе функционирования экономической системы и, наоборот, воздействия системы в целом на отдельные ее элементы. [1] Федоренко Н.П. Системный под¬ход к изучению экономических явлений. — в кн.: Математика и кибернетика в экономике: Словарь-справочник. — М.: Эко¬номика, 1975, стр. 517.
[ http://slovar-lopatnikov.ru/]Тематики
EN
Русско-английский словарь нормативно-технической терминологии > системный анализ
17 транспортировка
транспортировка
Функциональный процесс передачи информации между различными пунктами (G.805 (определение), МСЭ-Т Y.1731, МСЭ-Т G.8010/Y.1306, МСЭ-Т G.8110/Y.1370, МСЭ-Т G.809).
[ http://www.iks-media.ru/glossary/index.html?glossid=2400324]Тематики
- электросвязь, основные понятия
EN
Русско-английский словарь нормативно-технической терминологии > транспортировка
18 программируемый логический контроллер
программируемый логический контроллер
ПЛК
-
[Интент]
контроллер
Управляющее устройство, осуществляющее автоматическое управление посредством программной реализации алгоритмов управления.
[Сборник рекомендуемых терминов. Выпуск 107. Теория управления.
Академия наук СССР. Комитет научно-технической терминологии. 1984 г.]EN
storage-programmable logic controller
computer-aided control equipment or system whose logic sequence can be varied via a directly or remote-control connected programming device, for example a control panel, a host computer or a portable terminal
[IEV ref 351-32-34]FR
automate programmable à mémoire
См. также:
équipement ou système de commande assisté par ordinateur dont la séquence logique peut être modifiée directement ou par l'intermédiaire d'un dispositif de programmation relié à une télécommande, par exemple un panneau de commande, un ordinateur hôte ou un terminal de données portatif
[IEV ref 351-32-34]
- архитектура контроллера;
- производительность контроллера;
- время реакции контроллера;
КЛАССИФИКАЦИЯ
Основным показателем ПЛК является количество каналов ввода-вывода. По этому признаку ПЛК делятся на следующие группы:- нано- ПЛК (менее 16 каналов);
- микро-ПЛК (более 16, до 100 каналов);
- средние (более 100, до 500 каналов);
- большие (более 500 каналов).
- моноблочными - в которых устройство ввода-вывода не может быть удалено из контроллера или заменено на другое. Конструктивно контроллер представляет собой единое целое с устройствами ввода-вывода (например, одноплатный контроллер). Моноблочный контроллер может иметь, например, 16 каналов дискретного ввода и 8 каналов релейного вывода;
- модульные - состоящие из общей корзины (шасси), в которой располагаются модуль центрального процессора и сменные модули ввода-вывода. Состав модулей выбирается пользователем в зависимости от решаемой задачи. Типовое количество слотов для сменных модулей - от 8 до 32;
- распределенные (с удаленными модулями ввода-вывода) - в которых модули ввода-вывода выполнены в отдельных корпусах, соединяются с модулем контроллера по сети (обычно на основе интерфейса RS-485) и могут быть расположены на расстоянии до 1,2 км от процессорного модуля.
Многие контроллеры имеют набор сменных процессорных плат разной производительности. Это позволяет расширить круг потенциальных пользователей системы без изменения ее конструктива.
По конструктивному исполнению и способу крепления контроллеры делятся на:- панельные (для монтажа на панель или дверцу шкафа);
- для монтажа на DIN-рейку внутри шкафа;
- для крепления на стене;
- стоечные - для монтажа в стойке;
- бескорпусные (обычно одноплатные) для применения в специализированных конструктивах производителей оборудования (OEM - "Original Equipment Manufact urer").
По области применения контроллеры делятся на следующие типы:- универсальные общепромышленные;
- для управления роботами;
- для управления позиционированием и перемещением;
- коммуникационные;
- ПИД-контроллеры;
- специализированные.
По способу программирования контроллеры бывают:- программируемые с лицевой панели контроллера;
- программируемые переносным программатором;
- программируемые с помощью дисплея, мыши и клавиатуры;
- программируемые с помощью персонального компьютера.
Контроллеры могут программироваться на следующих языках:- на классических алгоритмических языках (C, С#, Visual Basic);
- на языках МЭК 61131-3.
Контроллеры могут содержать в своем составе модули ввода-вывода или не содержать их. Примерами контроллеров без модулей ввода-вывода являются коммуникационные контроллеры, которые выполняют функцию межсетевого шлюза, или контроллеры, получающие данные от контроллеров нижнего уровня иерархии АСУ ТП. Контроллеры для систем автоматизации
Слово "контроллер" произошло от английского "control" (управление), а не от русского "контроль" (учет, проверка). Контроллером в системах автоматизации называют устройство, выполняющее управление физическими процессами по записанному в него алгоритму, с использованием информации, получаемой от датчиков и выводимой в исполнительные устройства.
Первые контроллеры появились на рубеже 60-х и 70-х годов в автомобильной промышленности, где использовались для автоматизации сборочных линий. В то время компьютеры стоили чрезвычайно дорого, поэтому контроллеры строились на жесткой логике (программировались аппаратно), что было гораздо дешевле. Однако перенастройка с одной технологической линии на другую требовала фактически изготовления нового контроллера. Поэтому появились контроллеры, алгоритм работы которых мог быть изменен несколько проще - с помощью схемы соединений реле. Такие контроллеры получили название программируемых логических контроллеров (ПЛК), и этот термин сохранился до настоящего времени. Везде ниже термины "контроллер" и "ПЛК" мы будем употреблять как синонимы.
Немного позже появились ПЛК, которые можно было программировать на машинно-ориентированном языке, что было проще конструктивно, но требовало участия специально обученного программиста для внесения даже незначительных изменений в алгоритм управления. С этого момента началась борьба за упрощение процесса программирования ПЛК, которая привела сначала к созданию языков высокого уровня, затем - специализированных языков визуального программирования, похожих на язык релейной логики. В настоящее время этот процесс завершился созданием международного стандарта IEC (МЭК) 1131-3, который позже был переименован в МЭК 61131-3. Стандарт МЭК 61131-3 поддерживает пять языков технологического программирования, что исключает необходимость привлечения профессиональных программистов при построении систем с контроллерами, оставляя для них решение нестандартных задач.
В связи с тем, что способ программирования является наиболее существенным классифицирующим признаком контроллера, понятие "ПЛК" все реже используется для обозначения управляющих контроллеров, которые не поддерживают технологические языки программирования. Жесткие ограничения на стоимость и огромное разнообразие целей автоматизации привели к невозможности создания универсального ПЛК, как это случилось с офисными компьютерами. Область автоматизации выдвигает множество задач, в соответствии с которыми развивается и рынок, содержащий сотни непохожих друг на друга контроллеров, различающихся десятками параметров.
Выбор оптимального для конкретной задачи контроллера основывается обычно на соответствии функциональных характеристик контроллера решаемой задаче при условии минимальной его стоимости. Учитываются также другие важные характеристики (температурный диапазон, надежность, бренд изготовителя, наличие разрешений Ростехнадзора, сертификатов и т. п.).
Несмотря на огромное разнообразие контроллеров, в их развитии заметны следующие общие тенденции:- уменьшение габаритов;
- расширение функциональных возможностей;
- увеличение количества поддерживаемых интерфейсов и сетей;
- использование идеологии "открытых систем";
- использование языков программирования стандарта МЭК 61131-3;
- снижение цены.
[ http://bookasutp.ru/Chapter6_1.aspx]
Программируемый логический контроллер (ПЛК, PLC) – микропроцессорное устройство, предназначенное для управления технологическим процессом и другими сложными технологическими объектами.
Принцип работы контроллера состоит в выполнение следующего цикла операций:
1. Сбор сигналов с датчиков;
2. Обработка сигналов согласно прикладному алгоритму управления;
3. Выдача управляющих воздействий на исполнительные устройства.
В нормальном режиме работы контроллер непрерывно выполняет этот цикл с частотой от 50 раз в секунду. Время, затрачиваемое контроллером на выполнение полного цикла, часто называют временем (или периодом) сканирования; в большинстве современных ПЛК сканирование может настраиваться пользователем в диапазоне от 20 до 30000 миллисекунд. Для быстрых технологических процессов, где критична скорость реакции системы и требуется оперативное регулирование, время сканирования может составлять 20 мс, однако для большинства непрерывных процессов период 100 мс считается вполне приемлемым.
Аппаратно контроллеры имеют модульную архитектуру и могут состоять из следующих компонентов:
1. Базовая панель ( Baseplate). Она служит для размещения на ней других модулей системы, устанавливаемых в специально отведенные позиции (слоты). Внутри базовой панели проходят две шины: одна - для подачи питания на электронные модули, другая – для пересылки данных и информационного обмена между модулями.
2. Модуль центрального вычислительного устройства ( СPU). Это мозг системы. Собственно в нем и происходит математическая обработка данных. Для связи с другими устройствами CPU часто оснащается сетевым интерфейсом, поддерживающим тот или иной коммуникационный стандарт.
3. Дополнительные коммуникационные модули. Необходимы для добавления сетевых интерфейсов, неподдерживаемых напрямую самим CPU. Коммуникационные модули существенно расширяют возможности ПЛК по сетевому взаимодействию. C их помощью к контроллеру подключают узлы распределенного ввода/вывода, интеллектуальные полевые приборы и станции операторского уровня.
4. Блок питания. Нужен для запитки системы от 220 V. Однако многие ПЛК не имеют стандартного блока питания и запитываются от внешнего.
Рис.1. Контроллер РСУ с коммуникациями Profibus и Ethernet.
Иногда на базовую панель, помимо указанных выше, допускается устанавливать модули ввода/вывода полевых сигналов, которые образуют так называемый локальный ввод/вывод. Однако для большинства РСУ (DCS) характерно использование именно распределенного (удаленного) ввода/вывода.
Отличительной особенностью контроллеров, применяемых в DCS, является возможность их резервирования. Резервирование нужно для повышения отказоустойчивости системы и заключается, как правило, в дублировании аппаратных модулей системы.
Рис. 2. Резервированный контроллер с коммуникациями Profibus и Ethernet.
Резервируемые модули работают параллельно и выполняют одни и те же функции. При этом один модуль находится в активном состоянии, а другой, являясь резервом, – в режиме “standby”. В случае отказа активного модуля, система автоматически переключается на резерв (это называется “горячий резерв”).
Обратите внимание, контроллеры связаны шиной синхронизации, по которой они мониторят состояние друг друга. Это решение позволяет разнести резервированные модули на значительное расстояние друг от друга (например, расположить их в разных шкафах или даже аппаратных).
Допустим, в данный момент активен левый контроллер, правый – находится в резерве. При этом, даже находясь в резерве, правый контроллер располагает всеми процессными данными и выполняет те же самые математические операции, что и левый. Контроллеры синхронизированы. Предположим, случается отказ левого контроллера, а именно модуля CPU. Управление автоматически передается резервному контроллеру, и теперь он становится главным. Здесь очень большое значение имеют время, которое система тратит на переключение на резерв (обычно меньше 0.5 с) и отсутствие возмущений (удара). Теперь система работает на резерве. Как только инженер заменит отказавший модуль CPU на исправный, система автоматически передаст ему управление и возвратится в исходное состояние.
На рис. 3 изображен резервированный контроллер S7-400H производства Siemens. Данный контроллер входит в состав РСУ Simatic PCS7.
Рис. 3. Резервированный контроллер S7-400H. Несколько другое техническое решение показано на примере резервированного контроллера FCP270 производства Foxboro (рис. 4). Данный контроллер входит в состав системы управления Foxboro IA Series.
Рис. 4. Резервированный контроллер FCP270.
На базовой панели инсталлировано два процессорных модуля, работающих как резервированная пара, и коммуникационный модуль для сопряжения с оптическими сетями стандарта Ethernet. Взаимодействие между модулями происходит по внутренней шине (тоже резервированной), спрятанной непосредственно в базовую панель (ее не видно на рисунке).
На рисунке ниже показан контроллер AC800M производства ABB (часть РСУ Extended Automation System 800xA).
Рис. 5. Контроллер AC800M.
Это не резервированный вариант. Контроллер состоит из двух коммуникационных модулей, одного СPU и одного локального модуля ввода/вывода. Кроме этого, к контроллеру можно подключить до 64 внешних модулей ввода/вывода.
При построении РСУ важно выбрать контроллер, удовлетворяющий всем техническим условиям и требованиям конкретного производства. Подбирая оптимальную конфигурацию, инженеры оперируют определенными техническими характеристиками промышленных контроллеров. Наиболее значимые перечислены ниже:
1. Возможность полного резервирования. Для задач, где отказоустойчивость критична (химия, нефтехимия, металлургия и т.д.), применение резервированных конфигураций вполне оправдано, тогда как для других менее ответственных производств резервирование зачастую оказывается избыточным решением.
2. Количество и тип поддерживаемых коммуникационных интерфейсов. Это определяет гибкость и масштабируемость системы управления в целом. Современные контроллеры способны поддерживать до 10 стандартов передачи данных одновременно, что во многом определяет их универсальность.
3. Быстродействие. Измеряется, как правило, в количестве выполняемых в секунду элементарных операций (до 200 млн.). Иногда быстродействие измеряется количеством обрабатываемых за секунду функциональных блоков (что такое функциональный блок – будет рассказано в следующей статье). Быстродействие зависит от типа центрального процессора (популярные производители - Intel, AMD, Motorola, Texas Instruments и т.д.)
4. Объем оперативной памяти. Во время работы контроллера в его оперативную память загружены запрограммированные пользователем алгоритмы автоматизированного управления, операционная система, библиотечные модули и т.д. Очевидно, чем больше оперативной памяти, тем сложнее и объемнее алгоритмы контроллер может выполнять, тем больше простора для творчества у программиста. Варьируется от 256 килобайт до 32 мегабайт.
5. Надежность. Наработка на отказ до 10-12 лет.
6. Наличие специализированных средств разработки и поддержка различных языков программирования. Очевидно, что существование специализированный среды разработки прикладных программ – это стандарт для современного контроллера АСУ ТП. Для удобства программиста реализуется поддержка сразу нескольких языков как визуального, так и текстового (процедурного) программирования (FBD, SFC, IL, LAD, ST; об этом в следующей статье).
7. Возможность изменения алгоритмов управления на “лету” (online changes), т.е. без остановки работы контроллера. Для большинства контроллеров, применяемых в РСУ, поддержка online changes жизненно необходима, так как позволяет тонко настраивать систему или расширять ее функционал прямо на работающем производстве.
8. Возможность локального ввода/вывода. Как видно из рис. 4 контроллер Foxboro FCP270 рассчитан на работу только с удаленной подсистемой ввода/вывода, подключаемой к нему по оптическим каналам. Simatic S7-400 может спокойно работать как с локальными модулями ввода/вывода (свободные слоты на базовой панели есть), так и удаленными узлами.
9. Вес, габаритные размеры, вид монтажа (на DIN-рейку, на монтажную панель или в стойку 19”). Важно учитывать при проектировании и сборке системных шкафов.
10. Условия эксплуатации (температура, влажность, механические нагрузки). Большинство промышленных контроллеров могут работать в нечеловеческих условиях от 0 до 65 °С и при влажности до 95-98%.
[ http://kazanets.narod.ru/PLC_PART1.htm]Тематики
Синонимы
EN
DE
- speicherprogrammierbare Steuerung, f
FR
Русско-французский словарь нормативно-технической терминологии > программируемый логический контроллер
19 plc
- связь по ЛЭП
- программируемый логический контроллер
- несущая в канале ВЧ-связи по ЛЭП
- маскирование потери пакета
- контроллер с программируемой логикой
- акционерная компания с ограниченной ответственностью
акционерная компания с ограниченной ответственностью
AG - аббревиатура для обозначения AKTIENGESELLSCHAFT (акционерное общество). Оно пишется после названия немецких, австрийских или швейцарских компаний и является эквивалентом английской аббревиатуры plc (public limited company-акционерная компания с ограниченной ответственностью). Сравни: GmbH.
[ http://www.vocable.ru/dictionary/533/symbol/97]Тематики
EN
DE
- AG
контроллер с программируемой логикой
—
[А.С.Гольдберг. Англо-русский энергетический словарь. 2006 г.]Тематики
EN
маскирование потери пакета
Метод сокрытия факта потери медиапакетов путем генерирования синтезируемых пакетов (МСЭ-T G.1050).
[ http://www.iks-media.ru/glossary/index.html?glossid=2400324]Тематики
- электросвязь, основные понятия
EN
несущая в канале ВЧ-связи по ЛЭП
—
[Я.Н.Лугинский, М.С.Фези-Жилинская, Ю.С.Кабиров. Англо-русский словарь по электротехнике и электроэнергетике, Москва, 1999]Тематики
- электротехника, основные понятия
EN
программируемый логический контроллер
ПЛК
-
[Интент]
контроллер
Управляющее устройство, осуществляющее автоматическое управление посредством программной реализации алгоритмов управления.
[Сборник рекомендуемых терминов. Выпуск 107. Теория управления.
Академия наук СССР. Комитет научно-технической терминологии. 1984 г.]EN
storage-programmable logic controller
computer-aided control equipment or system whose logic sequence can be varied via a directly or remote-control connected programming device, for example a control panel, a host computer or a portable terminal
[IEV ref 351-32-34]FR
automate programmable à mémoire
См. также:
équipement ou système de commande assisté par ordinateur dont la séquence logique peut être modifiée directement ou par l'intermédiaire d'un dispositif de programmation relié à une télécommande, par exemple un panneau de commande, un ordinateur hôte ou un terminal de données portatif
[IEV ref 351-32-34]
- архитектура контроллера;
- производительность контроллера;
- время реакции контроллера;
КЛАССИФИКАЦИЯ
Основным показателем ПЛК является количество каналов ввода-вывода. По этому признаку ПЛК делятся на следующие группы:- нано- ПЛК (менее 16 каналов);
- микро-ПЛК (более 16, до 100 каналов);
- средние (более 100, до 500 каналов);
- большие (более 500 каналов).
- моноблочными - в которых устройство ввода-вывода не может быть удалено из контроллера или заменено на другое. Конструктивно контроллер представляет собой единое целое с устройствами ввода-вывода (например, одноплатный контроллер). Моноблочный контроллер может иметь, например, 16 каналов дискретного ввода и 8 каналов релейного вывода;
- модульные - состоящие из общей корзины (шасси), в которой располагаются модуль центрального процессора и сменные модули ввода-вывода. Состав модулей выбирается пользователем в зависимости от решаемой задачи. Типовое количество слотов для сменных модулей - от 8 до 32;
- распределенные (с удаленными модулями ввода-вывода) - в которых модули ввода-вывода выполнены в отдельных корпусах, соединяются с модулем контроллера по сети (обычно на основе интерфейса RS-485) и могут быть расположены на расстоянии до 1,2 км от процессорного модуля.
Многие контроллеры имеют набор сменных процессорных плат разной производительности. Это позволяет расширить круг потенциальных пользователей системы без изменения ее конструктива.
По конструктивному исполнению и способу крепления контроллеры делятся на:- панельные (для монтажа на панель или дверцу шкафа);
- для монтажа на DIN-рейку внутри шкафа;
- для крепления на стене;
- стоечные - для монтажа в стойке;
- бескорпусные (обычно одноплатные) для применения в специализированных конструктивах производителей оборудования (OEM - "Original Equipment Manufact urer").
По области применения контроллеры делятся на следующие типы:- универсальные общепромышленные;
- для управления роботами;
- для управления позиционированием и перемещением;
- коммуникационные;
- ПИД-контроллеры;
- специализированные.
По способу программирования контроллеры бывают:- программируемые с лицевой панели контроллера;
- программируемые переносным программатором;
- программируемые с помощью дисплея, мыши и клавиатуры;
- программируемые с помощью персонального компьютера.
Контроллеры могут программироваться на следующих языках:- на классических алгоритмических языках (C, С#, Visual Basic);
- на языках МЭК 61131-3.
Контроллеры могут содержать в своем составе модули ввода-вывода или не содержать их. Примерами контроллеров без модулей ввода-вывода являются коммуникационные контроллеры, которые выполняют функцию межсетевого шлюза, или контроллеры, получающие данные от контроллеров нижнего уровня иерархии АСУ ТП. Контроллеры для систем автоматизации
Слово "контроллер" произошло от английского "control" (управление), а не от русского "контроль" (учет, проверка). Контроллером в системах автоматизации называют устройство, выполняющее управление физическими процессами по записанному в него алгоритму, с использованием информации, получаемой от датчиков и выводимой в исполнительные устройства.
Первые контроллеры появились на рубеже 60-х и 70-х годов в автомобильной промышленности, где использовались для автоматизации сборочных линий. В то время компьютеры стоили чрезвычайно дорого, поэтому контроллеры строились на жесткой логике (программировались аппаратно), что было гораздо дешевле. Однако перенастройка с одной технологической линии на другую требовала фактически изготовления нового контроллера. Поэтому появились контроллеры, алгоритм работы которых мог быть изменен несколько проще - с помощью схемы соединений реле. Такие контроллеры получили название программируемых логических контроллеров (ПЛК), и этот термин сохранился до настоящего времени. Везде ниже термины "контроллер" и "ПЛК" мы будем употреблять как синонимы.
Немного позже появились ПЛК, которые можно было программировать на машинно-ориентированном языке, что было проще конструктивно, но требовало участия специально обученного программиста для внесения даже незначительных изменений в алгоритм управления. С этого момента началась борьба за упрощение процесса программирования ПЛК, которая привела сначала к созданию языков высокого уровня, затем - специализированных языков визуального программирования, похожих на язык релейной логики. В настоящее время этот процесс завершился созданием международного стандарта IEC (МЭК) 1131-3, который позже был переименован в МЭК 61131-3. Стандарт МЭК 61131-3 поддерживает пять языков технологического программирования, что исключает необходимость привлечения профессиональных программистов при построении систем с контроллерами, оставляя для них решение нестандартных задач.
В связи с тем, что способ программирования является наиболее существенным классифицирующим признаком контроллера, понятие "ПЛК" все реже используется для обозначения управляющих контроллеров, которые не поддерживают технологические языки программирования. Жесткие ограничения на стоимость и огромное разнообразие целей автоматизации привели к невозможности создания универсального ПЛК, как это случилось с офисными компьютерами. Область автоматизации выдвигает множество задач, в соответствии с которыми развивается и рынок, содержащий сотни непохожих друг на друга контроллеров, различающихся десятками параметров.
Выбор оптимального для конкретной задачи контроллера основывается обычно на соответствии функциональных характеристик контроллера решаемой задаче при условии минимальной его стоимости. Учитываются также другие важные характеристики (температурный диапазон, надежность, бренд изготовителя, наличие разрешений Ростехнадзора, сертификатов и т. п.).
Несмотря на огромное разнообразие контроллеров, в их развитии заметны следующие общие тенденции:- уменьшение габаритов;
- расширение функциональных возможностей;
- увеличение количества поддерживаемых интерфейсов и сетей;
- использование идеологии "открытых систем";
- использование языков программирования стандарта МЭК 61131-3;
- снижение цены.
[ http://bookasutp.ru/Chapter6_1.aspx]
Программируемый логический контроллер (ПЛК, PLC) – микропроцессорное устройство, предназначенное для управления технологическим процессом и другими сложными технологическими объектами.
Принцип работы контроллера состоит в выполнение следующего цикла операций:
1. Сбор сигналов с датчиков;
2. Обработка сигналов согласно прикладному алгоритму управления;
3. Выдача управляющих воздействий на исполнительные устройства.
В нормальном режиме работы контроллер непрерывно выполняет этот цикл с частотой от 50 раз в секунду. Время, затрачиваемое контроллером на выполнение полного цикла, часто называют временем (или периодом) сканирования; в большинстве современных ПЛК сканирование может настраиваться пользователем в диапазоне от 20 до 30000 миллисекунд. Для быстрых технологических процессов, где критична скорость реакции системы и требуется оперативное регулирование, время сканирования может составлять 20 мс, однако для большинства непрерывных процессов период 100 мс считается вполне приемлемым.
Аппаратно контроллеры имеют модульную архитектуру и могут состоять из следующих компонентов:
1. Базовая панель ( Baseplate). Она служит для размещения на ней других модулей системы, устанавливаемых в специально отведенные позиции (слоты). Внутри базовой панели проходят две шины: одна - для подачи питания на электронные модули, другая – для пересылки данных и информационного обмена между модулями.
2. Модуль центрального вычислительного устройства ( СPU). Это мозг системы. Собственно в нем и происходит математическая обработка данных. Для связи с другими устройствами CPU часто оснащается сетевым интерфейсом, поддерживающим тот или иной коммуникационный стандарт.
3. Дополнительные коммуникационные модули. Необходимы для добавления сетевых интерфейсов, неподдерживаемых напрямую самим CPU. Коммуникационные модули существенно расширяют возможности ПЛК по сетевому взаимодействию. C их помощью к контроллеру подключают узлы распределенного ввода/вывода, интеллектуальные полевые приборы и станции операторского уровня.
4. Блок питания. Нужен для запитки системы от 220 V. Однако многие ПЛК не имеют стандартного блока питания и запитываются от внешнего.
Рис.1. Контроллер РСУ с коммуникациями Profibus и Ethernet.
Иногда на базовую панель, помимо указанных выше, допускается устанавливать модули ввода/вывода полевых сигналов, которые образуют так называемый локальный ввод/вывод. Однако для большинства РСУ (DCS) характерно использование именно распределенного (удаленного) ввода/вывода.
Отличительной особенностью контроллеров, применяемых в DCS, является возможность их резервирования. Резервирование нужно для повышения отказоустойчивости системы и заключается, как правило, в дублировании аппаратных модулей системы.
Рис. 2. Резервированный контроллер с коммуникациями Profibus и Ethernet.
Резервируемые модули работают параллельно и выполняют одни и те же функции. При этом один модуль находится в активном состоянии, а другой, являясь резервом, – в режиме “standby”. В случае отказа активного модуля, система автоматически переключается на резерв (это называется “горячий резерв”).
Обратите внимание, контроллеры связаны шиной синхронизации, по которой они мониторят состояние друг друга. Это решение позволяет разнести резервированные модули на значительное расстояние друг от друга (например, расположить их в разных шкафах или даже аппаратных).
Допустим, в данный момент активен левый контроллер, правый – находится в резерве. При этом, даже находясь в резерве, правый контроллер располагает всеми процессными данными и выполняет те же самые математические операции, что и левый. Контроллеры синхронизированы. Предположим, случается отказ левого контроллера, а именно модуля CPU. Управление автоматически передается резервному контроллеру, и теперь он становится главным. Здесь очень большое значение имеют время, которое система тратит на переключение на резерв (обычно меньше 0.5 с) и отсутствие возмущений (удара). Теперь система работает на резерве. Как только инженер заменит отказавший модуль CPU на исправный, система автоматически передаст ему управление и возвратится в исходное состояние.
На рис. 3 изображен резервированный контроллер S7-400H производства Siemens. Данный контроллер входит в состав РСУ Simatic PCS7.
Рис. 3. Резервированный контроллер S7-400H. Несколько другое техническое решение показано на примере резервированного контроллера FCP270 производства Foxboro (рис. 4). Данный контроллер входит в состав системы управления Foxboro IA Series.
Рис. 4. Резервированный контроллер FCP270.
На базовой панели инсталлировано два процессорных модуля, работающих как резервированная пара, и коммуникационный модуль для сопряжения с оптическими сетями стандарта Ethernet. Взаимодействие между модулями происходит по внутренней шине (тоже резервированной), спрятанной непосредственно в базовую панель (ее не видно на рисунке).
На рисунке ниже показан контроллер AC800M производства ABB (часть РСУ Extended Automation System 800xA).
Рис. 5. Контроллер AC800M.
Это не резервированный вариант. Контроллер состоит из двух коммуникационных модулей, одного СPU и одного локального модуля ввода/вывода. Кроме этого, к контроллеру можно подключить до 64 внешних модулей ввода/вывода.
При построении РСУ важно выбрать контроллер, удовлетворяющий всем техническим условиям и требованиям конкретного производства. Подбирая оптимальную конфигурацию, инженеры оперируют определенными техническими характеристиками промышленных контроллеров. Наиболее значимые перечислены ниже:
1. Возможность полного резервирования. Для задач, где отказоустойчивость критична (химия, нефтехимия, металлургия и т.д.), применение резервированных конфигураций вполне оправдано, тогда как для других менее ответственных производств резервирование зачастую оказывается избыточным решением.
2. Количество и тип поддерживаемых коммуникационных интерфейсов. Это определяет гибкость и масштабируемость системы управления в целом. Современные контроллеры способны поддерживать до 10 стандартов передачи данных одновременно, что во многом определяет их универсальность.
3. Быстродействие. Измеряется, как правило, в количестве выполняемых в секунду элементарных операций (до 200 млн.). Иногда быстродействие измеряется количеством обрабатываемых за секунду функциональных блоков (что такое функциональный блок – будет рассказано в следующей статье). Быстродействие зависит от типа центрального процессора (популярные производители - Intel, AMD, Motorola, Texas Instruments и т.д.)
4. Объем оперативной памяти. Во время работы контроллера в его оперативную память загружены запрограммированные пользователем алгоритмы автоматизированного управления, операционная система, библиотечные модули и т.д. Очевидно, чем больше оперативной памяти, тем сложнее и объемнее алгоритмы контроллер может выполнять, тем больше простора для творчества у программиста. Варьируется от 256 килобайт до 32 мегабайт.
5. Надежность. Наработка на отказ до 10-12 лет.
6. Наличие специализированных средств разработки и поддержка различных языков программирования. Очевидно, что существование специализированный среды разработки прикладных программ – это стандарт для современного контроллера АСУ ТП. Для удобства программиста реализуется поддержка сразу нескольких языков как визуального, так и текстового (процедурного) программирования (FBD, SFC, IL, LAD, ST; об этом в следующей статье).
7. Возможность изменения алгоритмов управления на “лету” (online changes), т.е. без остановки работы контроллера. Для большинства контроллеров, применяемых в РСУ, поддержка online changes жизненно необходима, так как позволяет тонко настраивать систему или расширять ее функционал прямо на работающем производстве.
8. Возможность локального ввода/вывода. Как видно из рис. 4 контроллер Foxboro FCP270 рассчитан на работу только с удаленной подсистемой ввода/вывода, подключаемой к нему по оптическим каналам. Simatic S7-400 может спокойно работать как с локальными модулями ввода/вывода (свободные слоты на базовой панели есть), так и удаленными узлами.
9. Вес, габаритные размеры, вид монтажа (на DIN-рейку, на монтажную панель или в стойку 19”). Важно учитывать при проектировании и сборке системных шкафов.
10. Условия эксплуатации (температура, влажность, механические нагрузки). Большинство промышленных контроллеров могут работать в нечеловеческих условиях от 0 до 65 °С и при влажности до 95-98%.
[ http://kazanets.narod.ru/PLC_PART1.htm]Тематики
Синонимы
EN
DE
- speicherprogrammierbare Steuerung, f
FR
связь по ЛЭП
—
[Я.Н.Лугинский, М.С.Фези-Жилинская, Ю.С.Кабиров. Англо-русский словарь по электротехнике и электроэнергетике, Москва, 1999 г.]Тематики
- электротехника, основные понятия
EN
Англо-русский словарь нормативно-технической терминологии > plc
20 system analysis
системный анализ
Совокупность методологических средств, используемых для подготовки и обоснования решений по сложным проблемам различного характера. Он опирается на системный подход, а также на ряд математических методов и современных методов управления. Основная процедура – построение обобщенной модели, отображающей взаимосвязи реальной ситуации. [http://www.rol.ru/files/dict/internet/#P].
[ http://www.morepc.ru/dict/]
системный анализ
1. Научная дисциплина, разрабатывающая общие принципы исследования сложных объектов с учетом их системного характера. 2. Методология исследования объектов посредством представления их в качестве систем и анализа этих систем. Как научную дисциплину С.а. можно считать развитием идей кибернетики. Как и кибернетика, он исследует категории, общие для многих дисциплин и относящиеся к так называемым системам, которые изучаются любой наукой. Когда речь идет об изучении действующих, развивающихся систем, какими являются и любой экономический объект, и экономика в целом, то системное исследование может иметь два аспекта — генетический и функциональный, т.е. изучение исторического развития системы и изучение ее реального действия, функционирования. Будучи методологией исследования объектов посредством представления их в качестве систем и анализа этих систем, С.а. представляет собой весьма эффективное средство решения сложных, обычно недостаточно четко сформулированных проблем в науке, на производстве и в других областях. При этом любой объект рассматривается не как единое, неразделимое целое, а как система взаимосвязанных составных элементов, их свойств, качеств. Например, в экономике отдельные стороны, характеризующие данный экономический процесс, рассматриваются как элементы системы, изучается их взаимосвязь. Соответственно С.а. сводится к уточнению сложной проблемы и ее структуризации в серию задач, решаемых с помощью экономико-математических методов, нахождению критериев их решения, детализации целей, конструированию эффективной организации для достижения целей. С.а. любого объекта проводится в несколько этапов. Главные из них следующие: 1. Постановка задачи — определение объекта исследования, постановка целей, задание критериев для изучения объекта и управления им. 2. Выделение системы, подлежащей изучению, и ее структуризация. 3. Составление математической модели изучаемой системы: параметризация, установление зависимостей между введенными параметрами, упрощение описания системы путем выделения подсистем и определения их иерархии, окончательная фиксация целей и критериев. Таким образом, создается модель системы, которая помогает лучше ее понять, выделить главное — то, благодаря чему можно поставить и решить задачу. Такую модель называют также абстрактной системой. Результаты исследования абстрактной системы по определенным правилам можно перенести на реальные изучаемые системы (объекты исследования). В этом смысл применения С.а. прежде всего при решении сложных проблем управления (сложных в том смысле, что требуют выбора наилучших альтернатив в условиях неполноты информации, неопределенности и т.п.). С.а. применяется, в частности, при проектировании организационных структур управления (здесь одно из правил заключается в том, что необходимо строить оргструктуры в зависимости от задачи и методов решения, а не наоборот, как обычно бывает на практике), при выборе альтернатив путем сопоставления затрат на реализацию возможных альтернатив с их ожидаемой эффективностью — такие методики, например, в США называются анализом “затраты-эффективность”, “затраты-выгоды” и др. Системный подход к изучению экономических явлений [systems approach in eco¬nomics] - “комплексное изучение экономики как единого целого с позиций системного анализа”[1]. Можно встретить двоякое понимание С.п.: с одной стороны, это — рассмотрение, анализ существующих систем, с другой — создание или, как часто говорят, конструирование, синтез систем для достижения каких-то целей. Эта двойственность отражает реальное положение дел. Анализ и синтез тесно связаны. Рассмотрим в качестве примера автоматизированную систему управления (АСУ). Ее создание — синтез системы — невозможно без анализа реальных процессов управления, взаимодействия отдельных звеньев предприятия, самого предприятия с внешним миром и т.д. Поскольку главная отличительная особенность большой или сложной системы — тесная взаимосвязь всех ее эле¬ментов и частей, то С.п. к анализу экономических явлений означает учет этих взаимосвязей, изучение отдельных экономических объектов как структурных частей более сложных систем, выявление роли каждого из них в общем процессе функционирования экономической системы и, наоборот, воздействия системы в целом на отдельные ее элементы. [1] Федоренко Н.П. Системный под¬ход к изучению экономических явлений. — в кн.: Математика и кибернетика в экономике: Словарь-справочник. — М.: Эко¬номика, 1975, стр. 517.
[ http://slovar-lopatnikov.ru/]Тематики
EN
Англо-русский словарь нормативно-технической терминологии > system analysis
Страницы- 1
- 2
См. также в других словарях:
Функциональный анализ (математ.) — Функциональный анализ, часть современной математики, главной задачей которой является изучение бесконечномерных пространств и их отображений. Наиболее изучены линейные пространства и линейные отображения. Для Ф. а. характерно сочетание методов… … Большая советская энциклопедия
Функциональный подход к анализу системы — [functional approach] в отличие от генетического изучение реального действия, функционирования системы. Основными понятиями такого анализа считаются два: процесс функционирования и закон функционирования. Процесс, или режим, функционирования… … Экономико-математический словарь
функциональный подход к анализу системы — В отличие от генетического изучение реального действия, функционирования системы. Основными понятиями такого анализа считаются два: процесс функционирования и закон функционирования. Процесс, или режим, функционирования показывает изменение… … Справочник технического переводчика
ПРОЦЕСС ПОЛИТИЧЕСКИЙ — ПРОЦЕСС ПОЛИТИЧЕСКИЙ осуществление политики в общественном пространстве и историческом времени. Пространственно временная локализация политического процесса может охватывать все время существования политики, тогда он понимается как… … Философская энциклопедия
Функциональный Мотив — (от лат. functio исполнение и moveo двигаю) элемент мотивационно потребностной сферы. Побуждение к деятельности, в которой эмоциональное удовлетворение приносит сам процесс деятельности, а не достигаемый … Психологический словарь
функциональный мотив — Этимология. Происходит от лат. functio исполнение и moveo двигаю. Категория. Элемент мотивационно потребностной сферы. Специфика. Побуждение к деятельности, в которой эмоциональное удовлетворение приносит сам процесс деятельности, а не… … Большая психологическая энциклопедия
Функциональный (технологический) узел — Функционально выделенный комплекс оборудования и устройств (конструкций, аппаратов, машин и механизмов, арматуры, трубных и электрических проводок, средств АСУ ТП), объединенный процессом выполнения автономной производственно технологической… … Словарь-справочник терминов нормативно-технической документации
Функциональный анализ — I Функциональный анализ часть современной математики, главной задачей которой является изучение бесконечномерных пространств и их отображений. Наиболее изучены линейные пространства и линейные отображения. Для Ф. а. характерно сочетание… … Большая советская энциклопедия
Функциональный анализ — разновидность анализа, характеризующегося как метод выявления функций рассматриваемого объекта и изучение их влияний на другие объекты. Функциональный анализ применим лишь к тем явлениям, которым приписываются функции, например, общественные… … Основы духовной культуры (энциклопедический словарь педагога)
СТРУКТУРНО-ФУНКЦИОНАЛЬНЫЙ АНАЛИЗ — один из принципов системного исследования социальных явлений и процессов как структурно расчленённой целостности, в которой каждый элемент структуры имеет определ. функциональное назначение. В марксистской социологии структурными… … Философская энциклопедия
КАНТОРОВИЧА ПРОЦЕСС — итерационный метод уточнения значения корня нелинейного функционального (операторного) уравнения (обобщение метода Ньютона). Для уравнения Р(х)=0, где Р нелинейная операция, действующая из одного банахова пространства в другое, вычислительная… … Математическая энциклопедия
 18+© Академик, 2000-2024
18+© Академик, 2000-2024- Обратная связь: Техподдержка, Реклама на сайте
Экспорт словарей на сайты, сделанные на PHP, Joomla, Drupal, WordPress, MODx.
Перевод: со всех языков на все языки
со всех языков на все языки- Со всех языков на:
- Все языки
- Со всех языков на:
- Все языки
- Английский
- Белорусский
- Немецкий
- Русский
- Французский